Method for calculating mean free path (MFP) of exploration rover against complex terrain environment
A complex terrain and detector technology, applied in the aerospace field, can solve the problems of not considering the mobility performance of obstacle-crossing ability, neglecting the verification of climbing ability, etc., so as to reduce the algorithm complexity and improve the simulation speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in combination with technical solutions and accompanying drawings. The size of the inspection detector in this embodiment is 1.5m in length, b=1.0m in width, the slope θ is limited to 20°, and the obstacle-crossing capability (vertical direction) h is 20cm.
[0043] A. Selection of patrol detector positioning point and driving direction
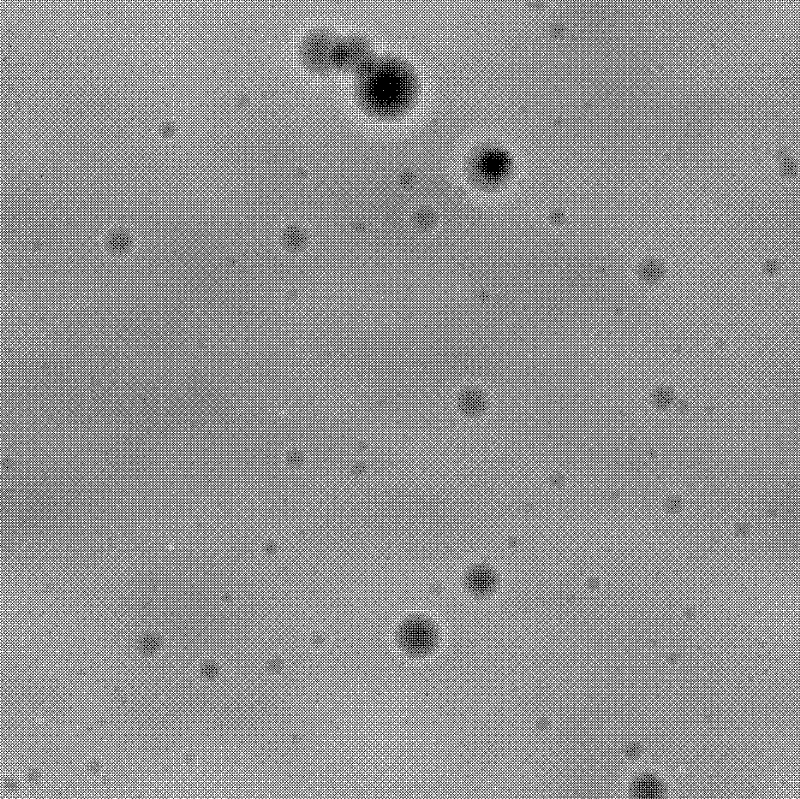
[0044] The first step is to take a piece of 60*60m in the Apollo 15 landing area on the lunar surface 2Taking the topographic data as an example, if the spatial distance represented by each pixel is selected as 60mm, it can be established figure 1 The 1000*1000 resolution star terrain digital elevation map DEM shown, the minimum elevation value Z of this area min -1.7m, the maximum elevation value Z max It is 1.45m, which corresponds to the gray level of 0-255 in the digital elevation map DEM, that is, each gray level represents a ground height of 12.35mm.
[0045] In the secon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com