Saucer submersible
A submersible, dish-shaped technology, applied in the field of robotics, can solve the problem of inability to achieve three-axis attitude adjustment in situ, and achieve the effect of simple structure, three-dimensional motion, and not easy to entangle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention is described in more detail below in conjunction with accompanying drawing example:
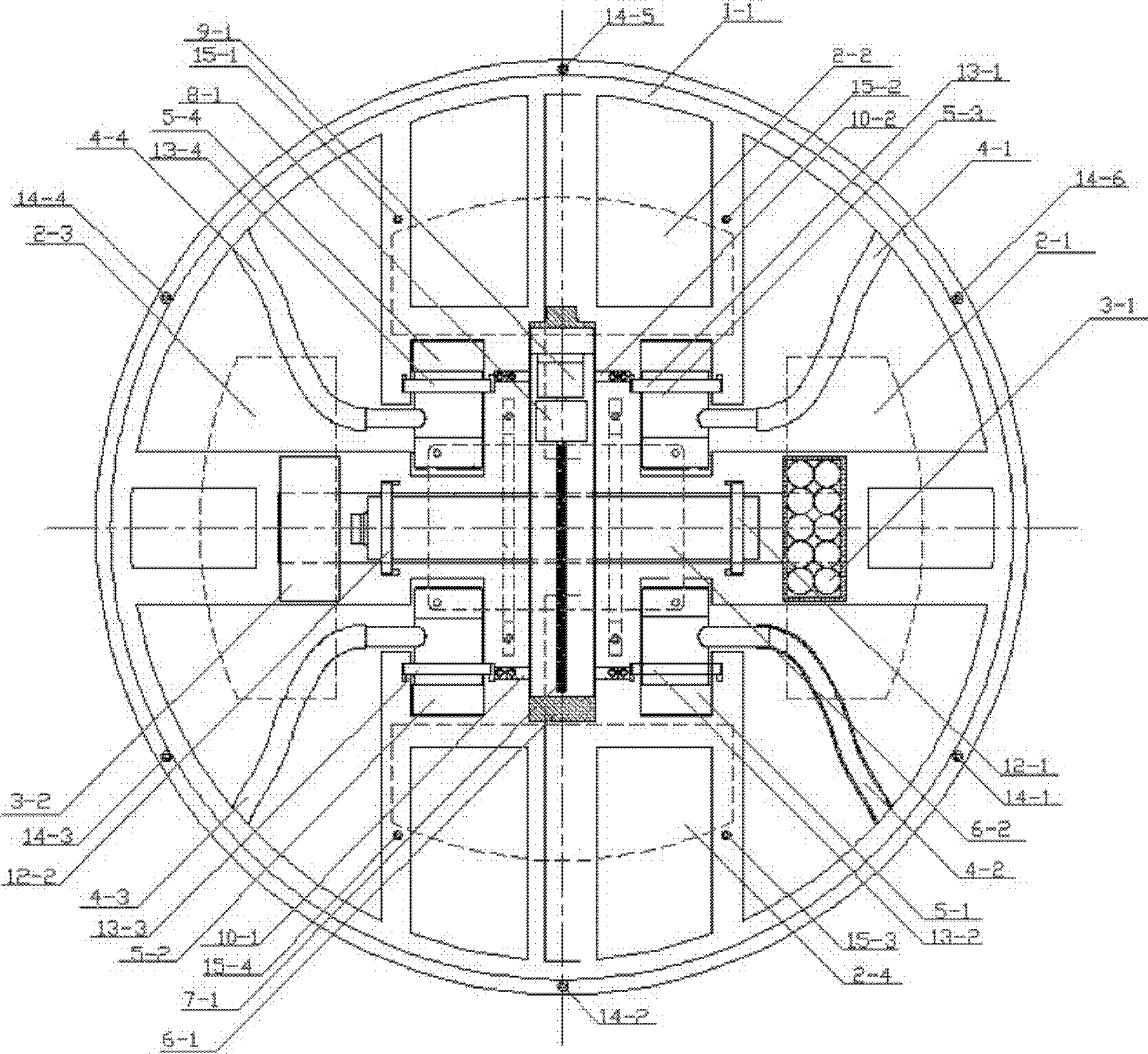
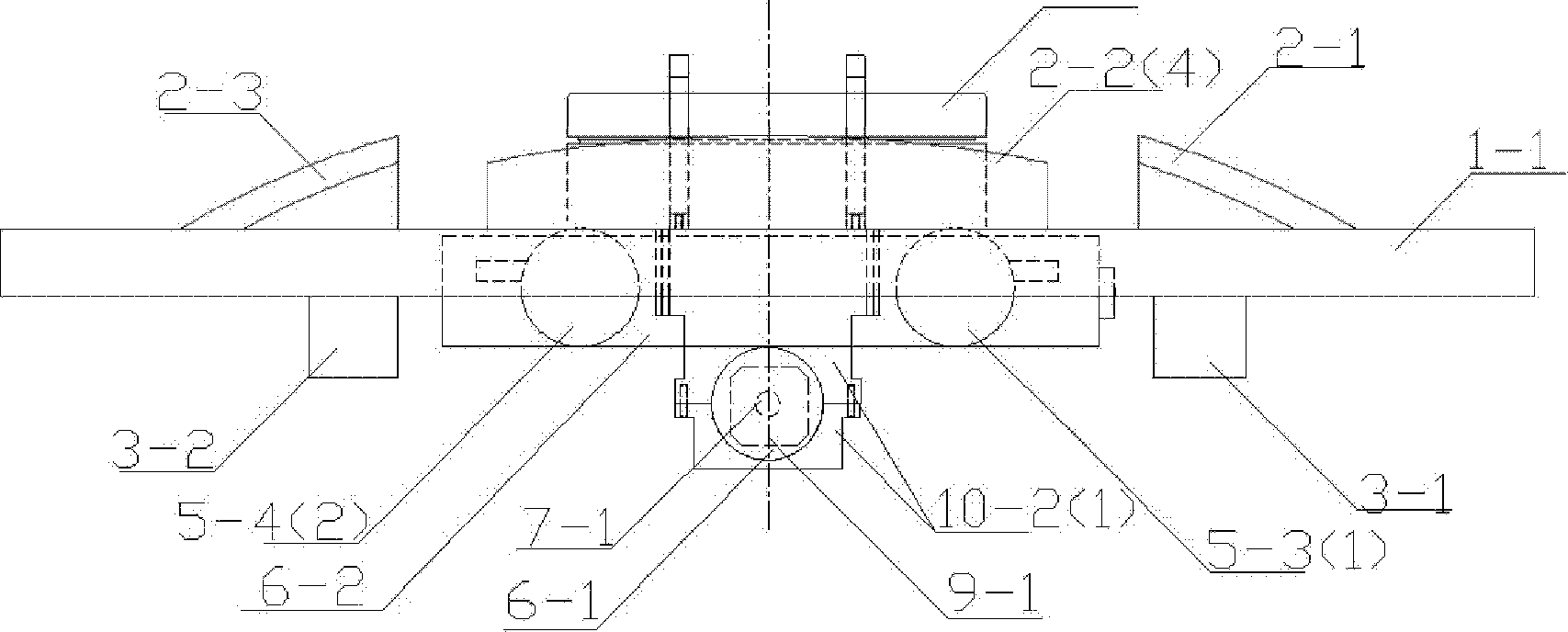
[0027] combine Figure 1-7 , figure 1 and figure 2 Both shells are transparentized. On the 1-1 nylon frame in the figure, the frame passes through four holes 15-1, 15-2, 15-3, and 15-4, and is fixed on the carbon fiber shell (bottom shell) with hexagon socket head bolts. The carbon fiber shell (top shell) is fixed on holes 14-1, 14-2, 14-3, 14-4, 14-5, and 14-6 on the frame 1-1 through bolts, and the shell of the whole machine is partially fixed. The buoyancy material 2-1, 2-2, 2-3, 2-4 utilizes silica gel to be fixed on the inboard of the carbon fiber shell (top), and all parts inside the dish-shaped submersible are all fixed on the frame 1-1. The battery compartments 3-1, 3-2 are fixed on the frame through silica gel. Water pumps 5-1, 5-2, 5-3, 5-4 pass stainless steel threaded cable ties 13-1, 13-2, 13-3, 13-4 and are fixed on the frame 1-1. One end of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com