


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Coal mine underground search-and-rescue detection robot moving device
A robot movement and robot technology, applied in the field of robotics, can solve the problem of poor obstacle-crossing performance, limited passing space, and does not take into account the roughness and unevenness of the road surface, and achieve the effect of small force and large road adhesion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
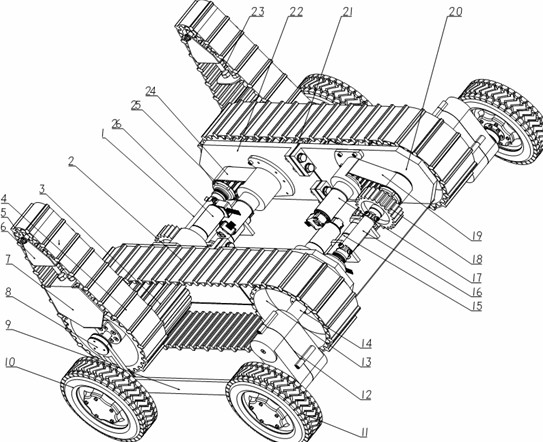
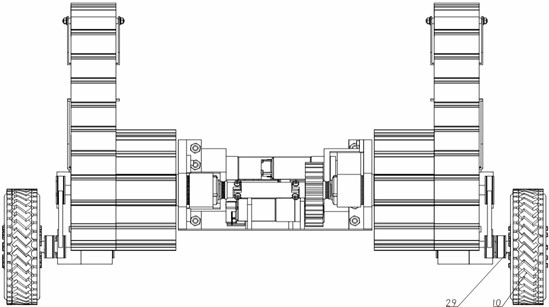
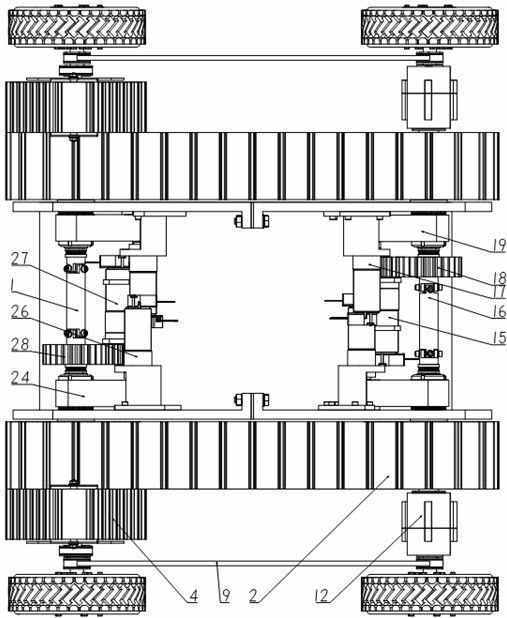
[0020] Such as figure 1 , figure 2 , image 3 with Figure 4 As shown, the moving device of the coal mine search and rescue detection robot with switchable wheels and shoes includes the walking crawler mechanism on the left and right sides, the front swing arm crawler mechanism, the wheel swing arm linkage mechanism, the car body chassis and the power unit. Among them, the walking crawler mechanism includes the active double wheel 3, the main crawler 2, the driven double wheel 13, the front hollow shaft 25, the rear hollow shaft 14, the crawler motor 26 and the synchronous belt device 24; 3 and the main crawler 2 on the outside of the driven double-coupled wheel 13 adopt double-sided toothed belts, and the inner belt teeth of the double-sided toothed belt play a driving role to ensure that the driving double-coupled wheels 3 and driven double-coupled wheels 13 on the same side same speed. After the output ends of the crawler motors on the left and right sides are connecte...
Embodiment approach 2
[0021] Implementation mode 2:Its backing plate 21 thickness is 3 millimeters, and other is the same as embodiment 1.
Embodiment approach 3
[0022] Implementation mode 3: Its backing plate 21 thickness is 8 millimeters, and other is the same as embodiment 1.
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com