Air-ground amphibious task set
A task group, land-air technology, applied in aircraft parts, ground devices, motor vehicles, etc., can solve the problems of simple flying robot communication system, inability to coordinate multiple robots, no information exchange, etc., to achieve fast cruising speed, energy saving, Effect of improving communication quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
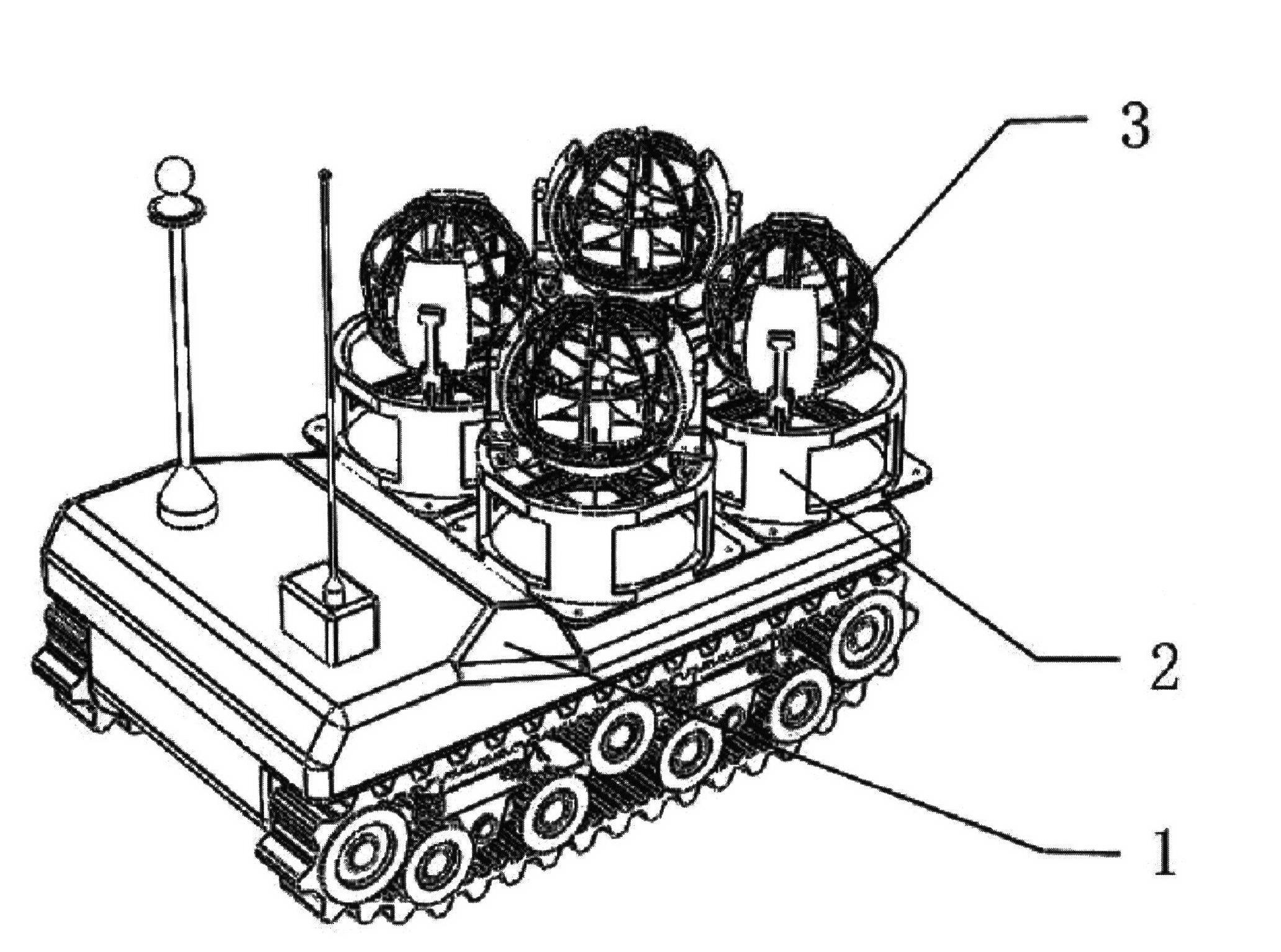
[0022] Below in conjunction with accompanying drawing, the special case of carrying 4 flying robots on a ground mobile platform among the present invention will be further described.
[0023] From attached figure 1 It can be seen that the land-air amphibious mission group uses the ground unmanned mobile platform 1 as a land-based mothership, on which four flying robots 3 are carried through the automatic release mechanism 2; Clamp the flying robot 3 to ensure that the flying robot will not become unstable and fall off from the unmanned mobile platform; the task group enters the task area in a traveling state to expand the mission radius of the task group, save the energy of the flying robot 3, and extend the flight time. The working time of robot 3 improves the ability of the entire task group to perform tasks.
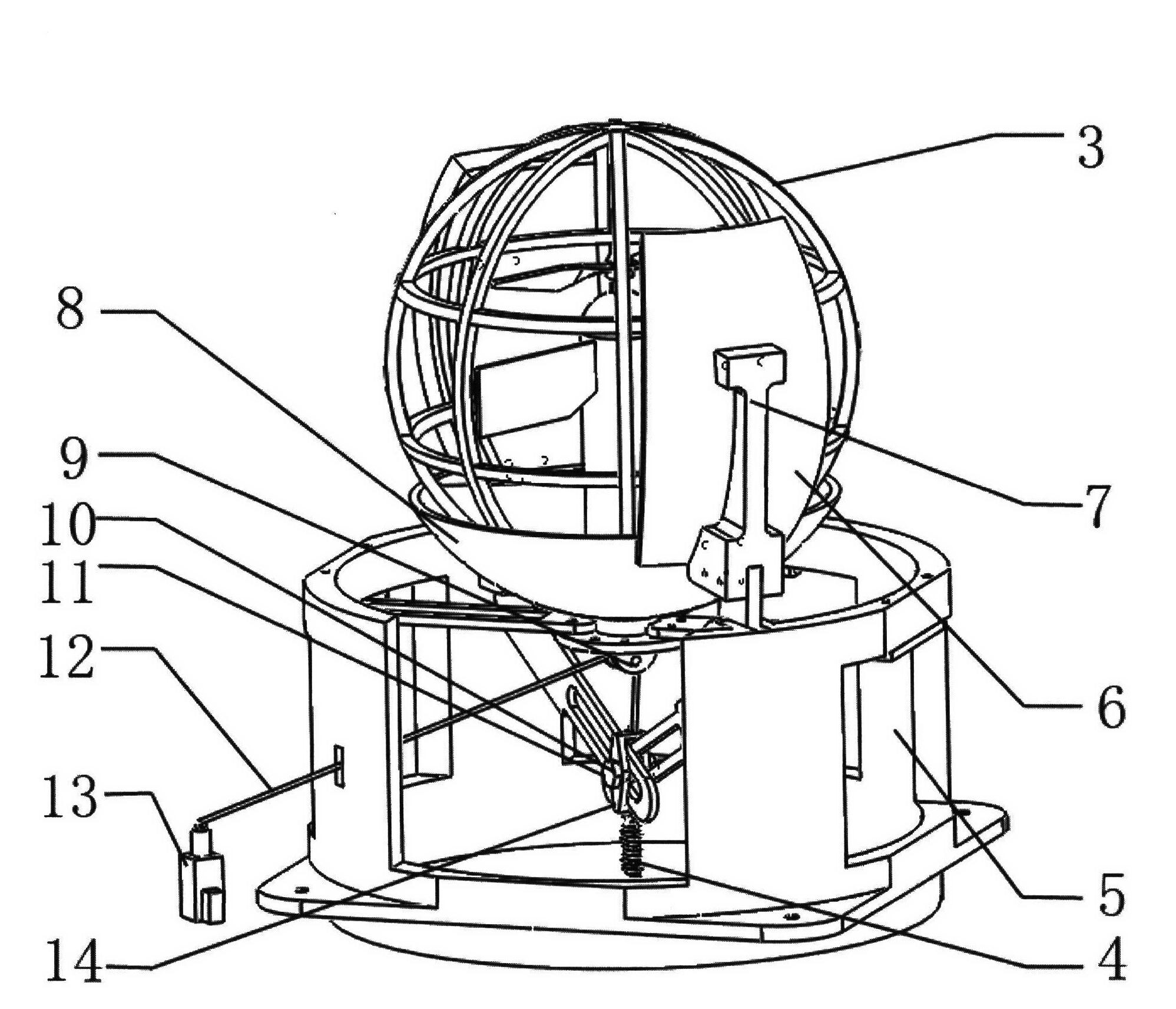
[0024] attached figure 2 Shown is the status of deployment and execution of the task after the mission team arrives at the mission area; the ground unmanned mobile...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com