Rollover movement control method of multi-joint dolphin robot
A motion control, multi-joint technology, applied in the field of bionics, can solve problems such as three-dimensional motion control, and achieve the effect of precise and flexible control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
[0012] 1. The mechanical structure of the bionic robot dolphin
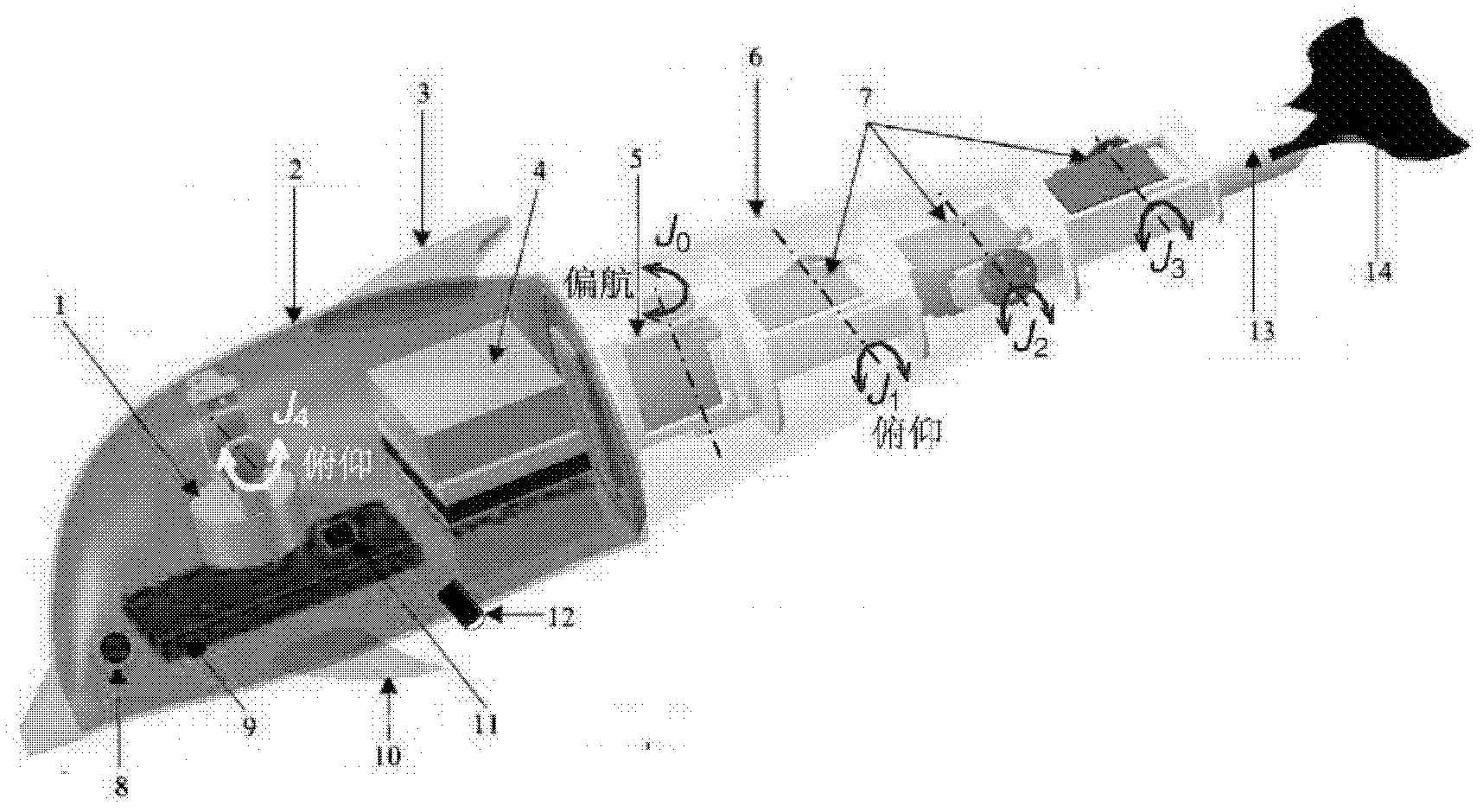
[0013] figure 1 is a schematic diagram of the structure of the bionic robot dolphin, such as figure 1 As shown, the bionic robot dolphin includes a rigid front body 2, a flexible rear body 6 with multiple pitch joints, a caudal fin 14, a pectoral fin 10, a dorsal fin 3, a control circuit board 9, a gyroscope 11, a pressure sensor 12, an infrared detection Device 8, moving slider 1, counterweight copper block 4, yaw joint 5, pitch joint 7, tail handle 13.
[0014] In the bionic robot dolphin, the front body 2 is connected to the flexible rear body 6 with multiple joints; the inside of the front body 2 is a hollow structure, and the interior is equipped with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com