Transformer substation inspection robot global path planning method based on magnetic navigation
A global path planning and inspection robot technology, applied in the direction of instruments, electrical components, computer components, etc., can solve the problems of prolonging the detection time of the robot, wasting the battery energy of the robot, and low detection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
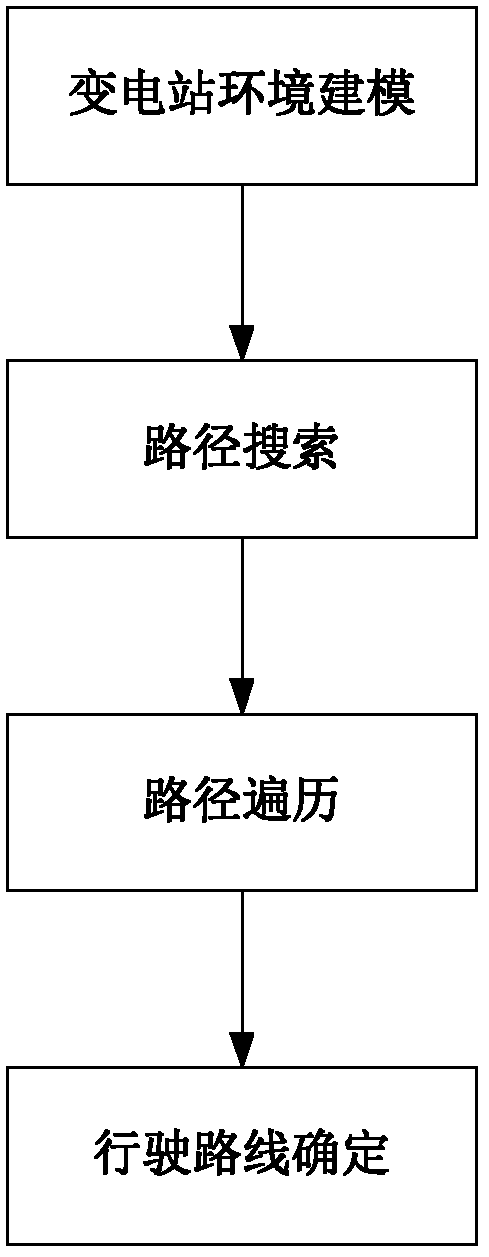
[0046] The present invention is achieved through the following technical solutions, and the present invention comprises the following steps:
[0047] The first step is to model the substation environment;
[0048] Through the modeling of the substation environment, a topology network diagram and a connectivity matrix are formed. Substation environment modeling refers to the modeling of substation environment with topology method, and connects the roads that can be walked to form a topology network diagram and a connectivity matrix. Among them, multiple RFIDs at the intersection are simplified and merged into one node in the graph, the road is an edge in the graph, and the length of the road is the length of the edge, which is also the weight of the edge in the connectivity matrix.
[0049] The second step is path search;
[0050] The Floyd (Floyd) al...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com