Place cell bionic robot navigation algorithm
A bionic robot and navigation algorithm technology, applied in the field of position cell bionic robot navigation algorithm, can solve problems such as different position fields
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] The present invention will be described in detail below in conjunction with specific embodiments.
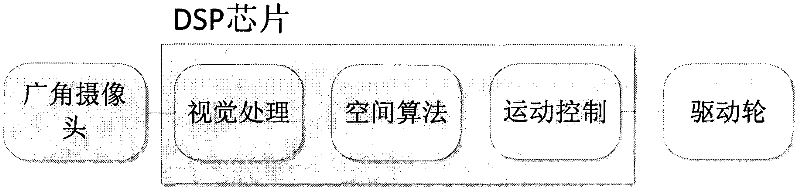
[0021] Such as figure 1 The hardware based on the location cell bionic robot navigation algorithm of the present invention shown in the present invention includes: a wide-angle camera for acquiring external images; a DSP chip for performing algorithms related to robot learning and cognitive environment; driving wheels, according to the DSP chip The movement commands issued drive the robot movement.
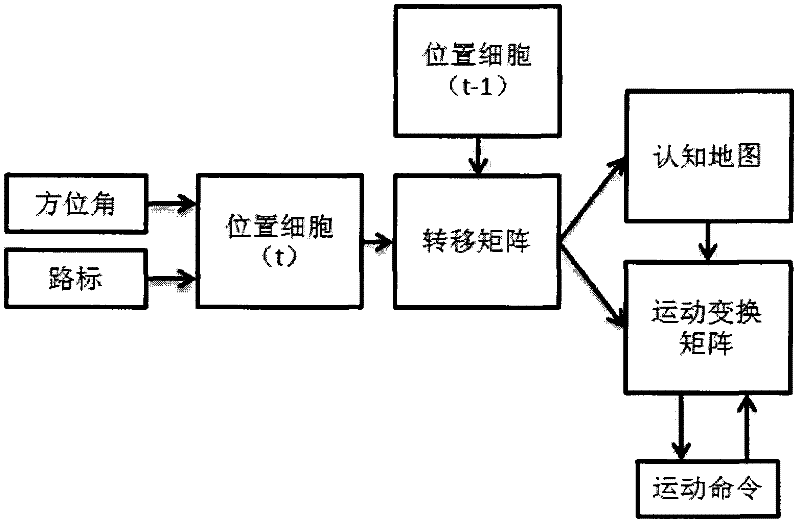
[0022] Biological place cells are only related to the location of the creature, and have nothing to do with the direction and speed of its movement. In order to mimic biological place cells, place cells are modeled with variables in the software environment of the DSP.
[0023] Such as figure 2 As shown, firstly, the robot’s wide-angle camera takes a panoramic photo, and converts it into a gradient map in order to remove the interference of brightness, and then filters it...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com