Overall input decoupling device for multi-rotor unmanned aerial vehicle and control system with device
A multi-rotor unmanned aerial vehicle, input decoupling technology, applied in the field of control system, multi-rotor unmanned aerial vehicle global input decoupling device, can solve the problems of complex control, difficult degree of freedom dynamic decoupling, etc., to reduce the complexity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
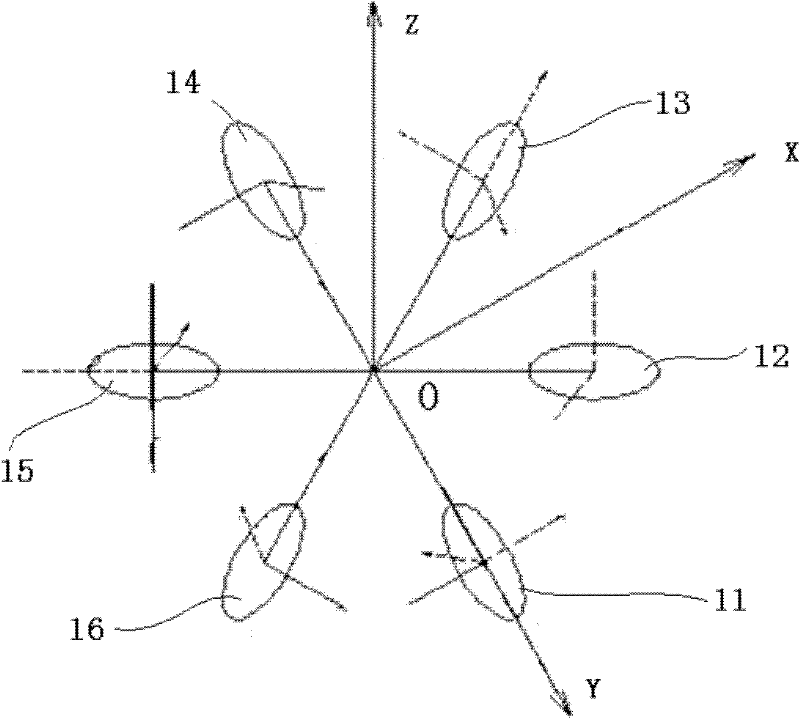
[0040] Such as image 3 As shown, the body of the full-drive six-rotor UAV is equipped with six connecting rods, which are evenly distributed around the body. The outer ends of the six connecting rods are respectively connected to No. 1, No. 2, ..., and No. ..., 16. Each rotor can be driven by a motor or an oil engine. The x and y axes of the body coordinate system of the rotor drone are located in the plane where the six connecting rods are located and are perpendicular to each other. The z axis passes through the center of mass of the drone and is perpendicular to The plane where the six connecting rods are located. The rotation planes of the six rotors form six inclinations with the xoy plane of the body coordinate system, and the rotation planes of each rotor are equal to the rotation planes of the third rotor separated by two rotors; the rotation planes of each rotor are the same as the adjacent rotors The inclination angle between the rotation plane of the first rotor 1...
Embodiment 2
[0068] Such as Figure 5 As shown, the body of the underactuated six-rotor UAV is provided with three connecting rods, which are evenly distributed around the body. The outer end of each connecting rod is connected to the upper and lower rotors. At the outer end of the bar, No. 3 and No. 4 rotors 23 and 24 are connected to the outer ends of the same connecting rod, and No. 5 and No. 6 rotors 25 and 26 are connected to the outer ends of the same connecting rod. Each rotor can be driven by a motor or an oil engine.
[0069] The relationship between the virtual control quantity of the degree of freedom of the underactuated hexacopter UAV and the rotor speed is as follows:
[0070] U 21 U 22 U 23 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com