


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Mechanical arm modularized joint with force position perceiving function
A technology of modular joints and sensory functions, which is applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of restricting the application of robot systems, heavy weight of manipulators, and low integration of manipulators, and achieve light weight, small size, The effect of high integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
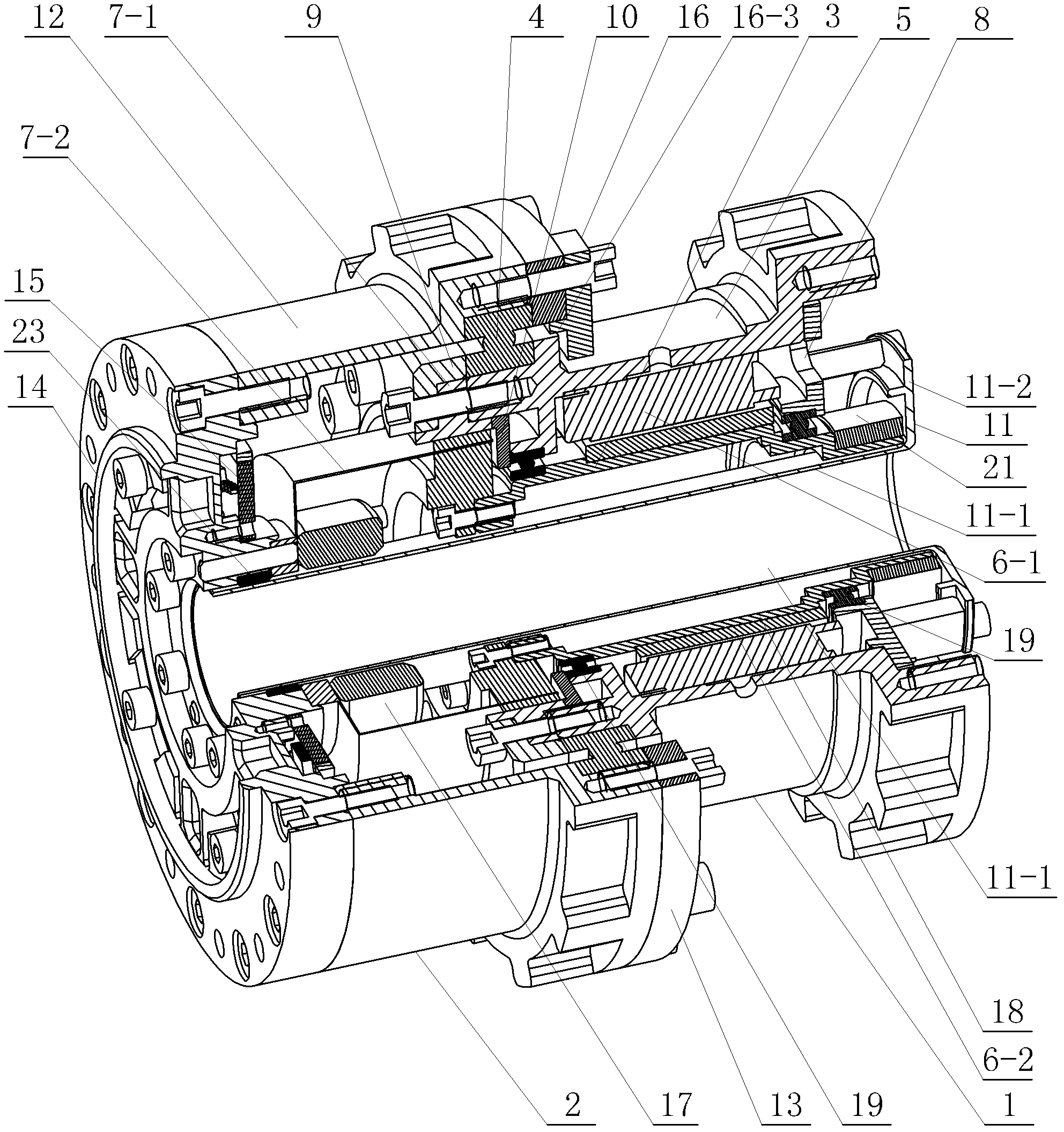
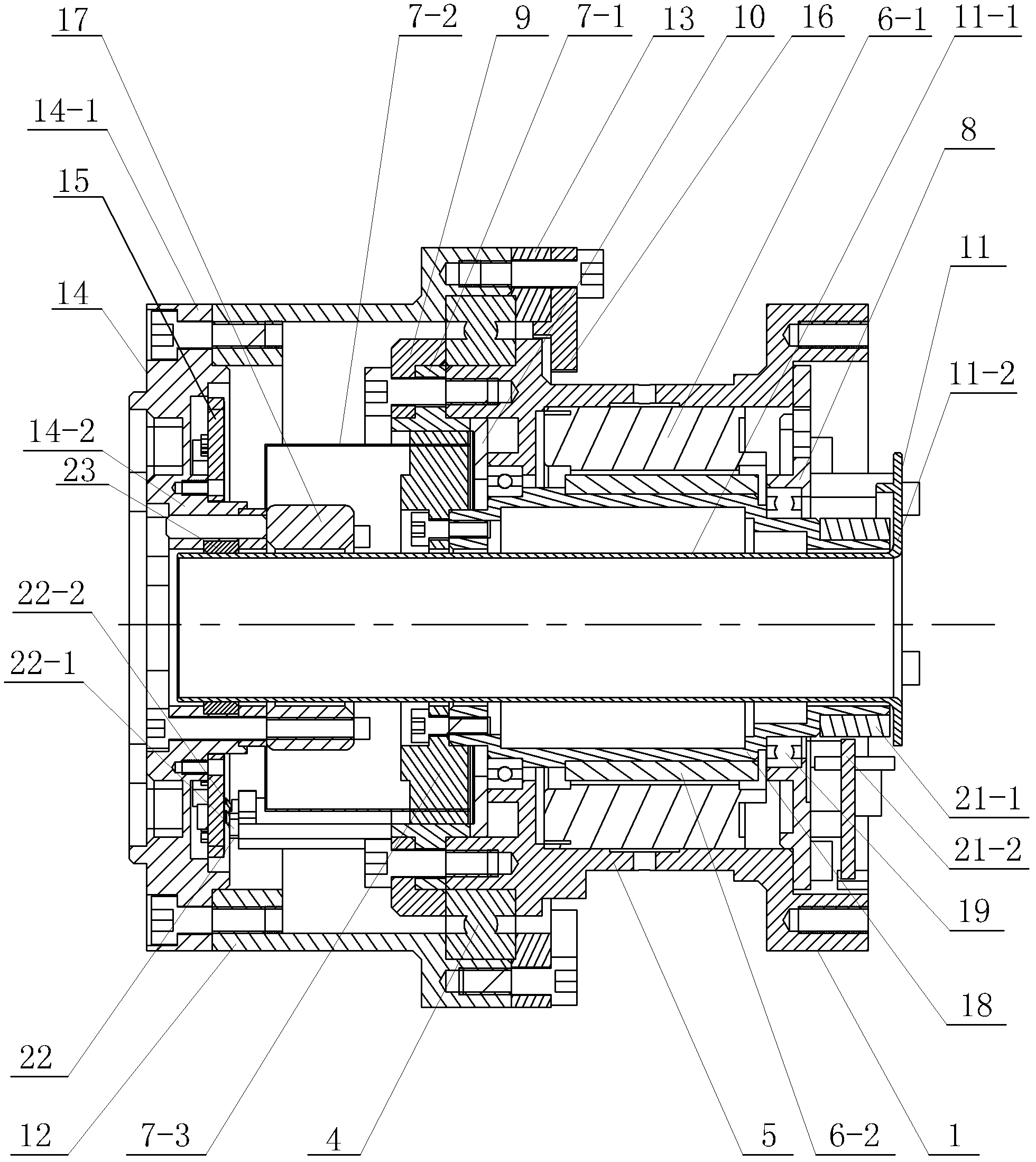
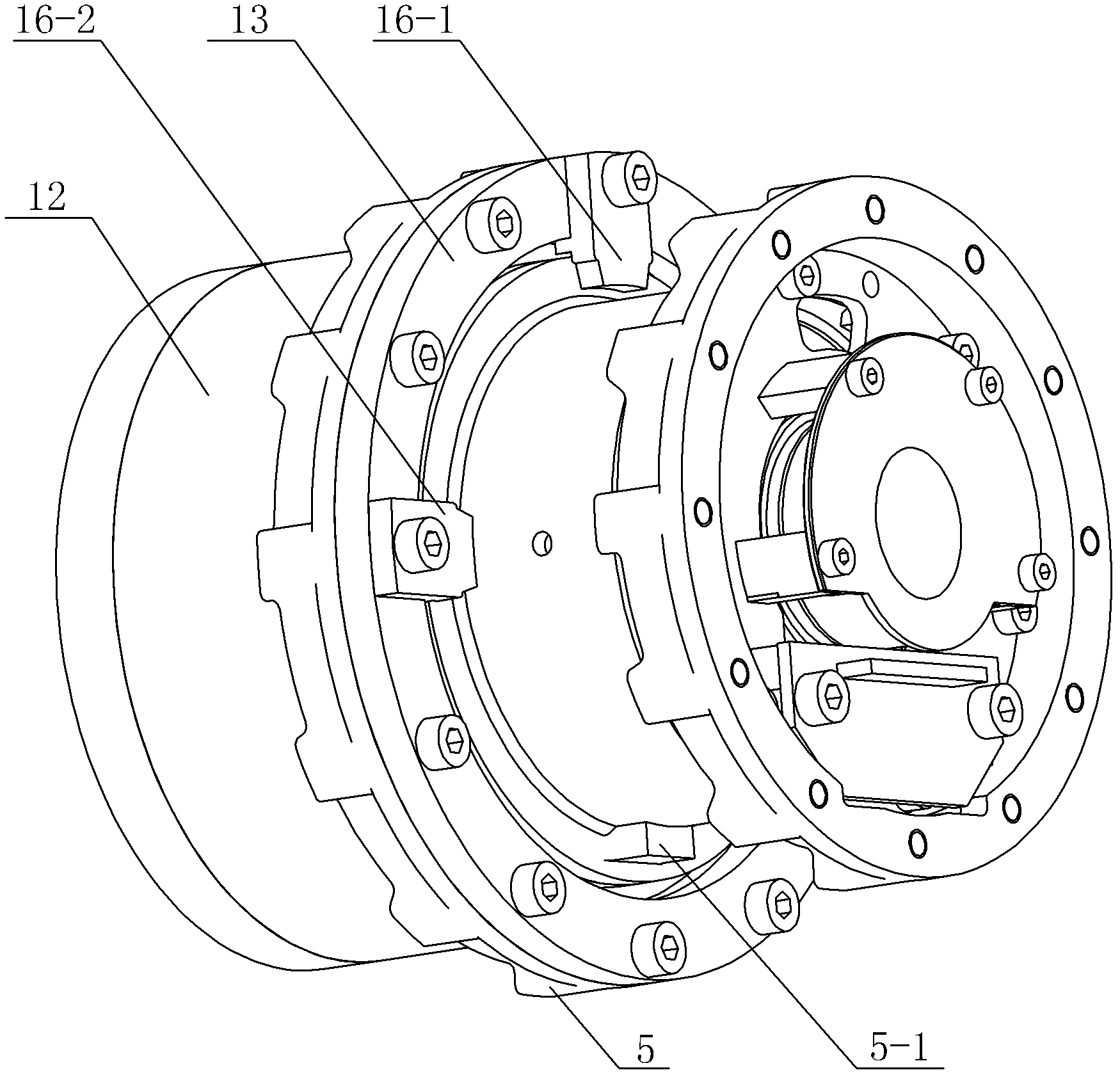
[0008] Specific implementation mode one: as Figure 1-7 As shown, the modular joint of the manipulator with force position sensing function in this embodiment includes the joint fixing device 1, the joint output device 2, the rotating device 3 and the cross roller bearing 4; the joint fixing The device 1 includes a fixed casing 5, a motor stator 6-1, a harmonic reducer rigid wheel 7-1, a first end cover 8, a second end cover 9, a pressure plate 10, a central hole wiring shaft 11, an insulating block 22-1 and The electric brush 22-2; the central hole routing shaft 11 is composed of a circular tube 11-1 and a circular plate 11-2, and one end of the circular tube 11-1 is fixedly connected with the circular plate 11-2; the joint output device 2 Including output housing 12, third end cover 13, torque sensor 14, harmonic reducer flexible wheel 7-2, connecting nut 17, nylon support 23 and two limit stops 16, two limit stops 16 Respectively the first limit block 16-1 and the second l...
specific Embodiment approach 2
[0012] Specific implementation mode two: combination figure 1 , figure 2 and Figure 5Illustrate, the torque sensor 14 of present embodiment comprises torque sensor 14 and comprises outer ring 14-1, inner ring 14-2, circuit board 15, four strain beams 14-3 and four overload protection blocks 24; Four strain beams 14 -3 is placed between the outer ring 14-1 and the inner ring 14-2, and the four strain beams 14-3 are evenly arranged along the circumferential direction of the outer ring 14-1 for transmitting the joint output torque (the torque direction is along the joint axis), an overload protection block 24 is arranged between two adjacent strain beams 14-3, four overload protection blocks 24 are connected to the inner ring 14-2, and each overload protection block 24 is connected to the outer ring 14-1 A gap is left (to make the strain beam 14-3 work within the elastic strain range, avoiding damage to the strain beam 14-3 due to output torque overload or impact), and the ci...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com