Elliptical six-degree-of-freedom parallel connection mechanism
A degree-of-freedom, elliptical technology used in manipulators, program-controlled manipulators, metal processing machine parts, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
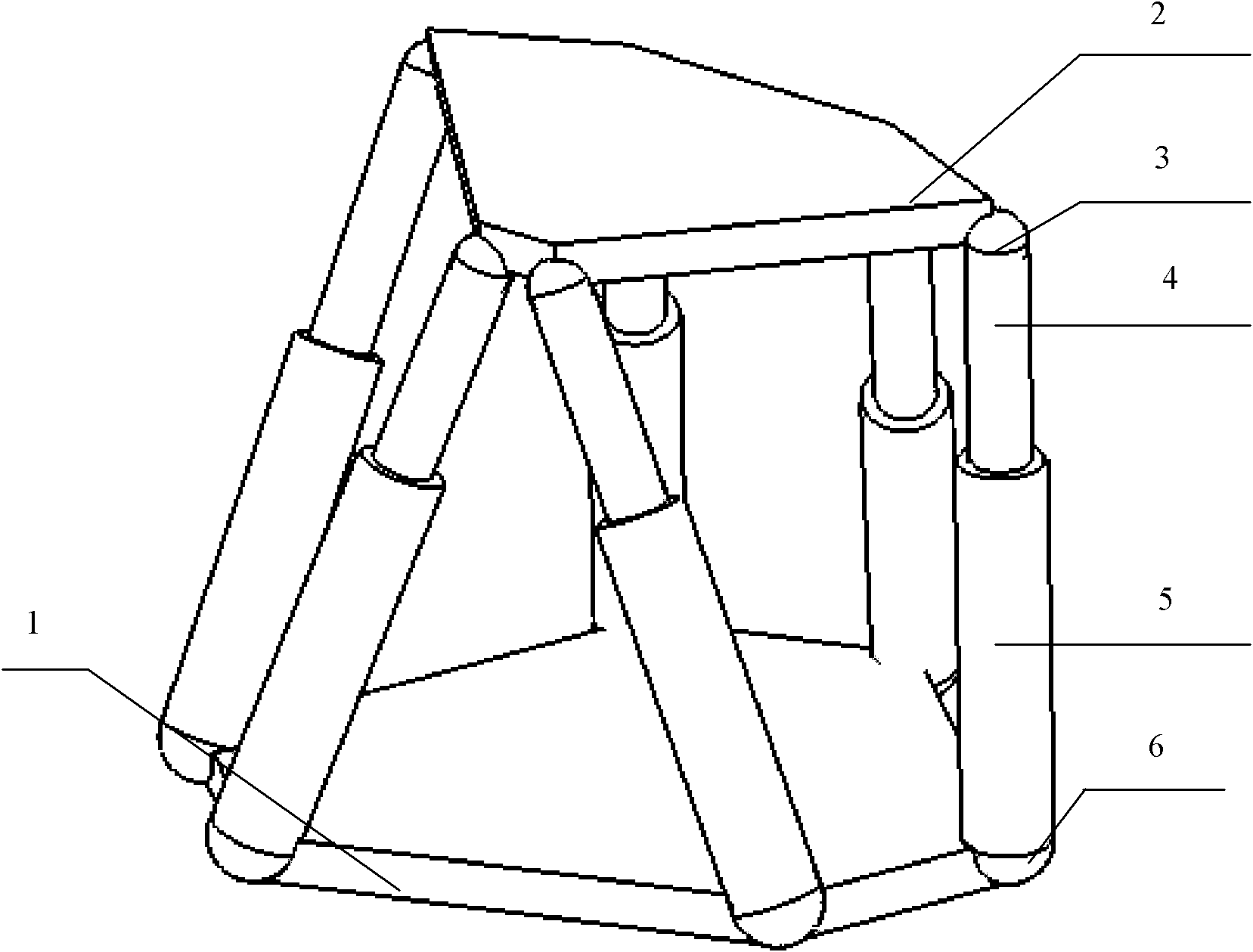
[0027] Please refer to the table above and figure 2 As shown, when c=d, the vertices of the static platform 1 are distributed on a circle, a≠b means that the vertices of the moving platform 2 are arranged on the circumference of an ellipse, and the driving rod includes the connected driving rod upper limb 4 and the driving rod lower limbs5. In this case, in the initial state, the minor axis of the ellipse where the upper hinge 3 connecting the moving platform 2 and the driving rod upper limb 4 is parallel to the symmetry axis of the lower hinge 6 connecting the static platform 1 and the driving rod lower limb 5 .
Embodiment approach 2
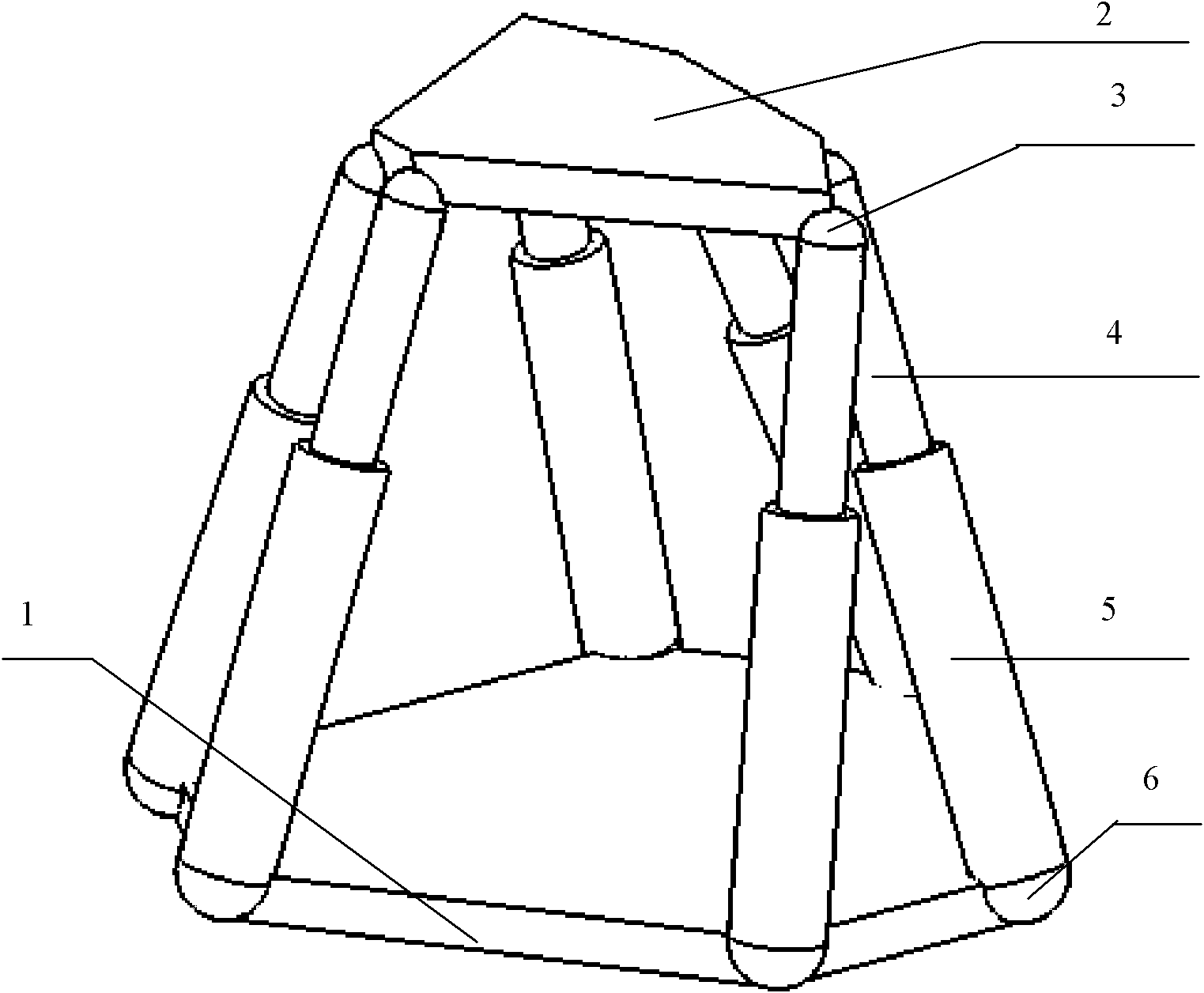
[0029] Please refer to the table above and image 3 As shown, when c=d, the vertices of the static platform 1 are distributed on a circle, a≠b means that the vertices of the moving platform 2 are arranged on the circumference of an ellipse, and the driving rod includes the connected driving rod upper limb 4 and the driving rod lower limbs5. In this case, in the initial state, the minor axis of the ellipse where the upper hinge 3 connecting the moving platform 2 and the upper limb 4 of the driving rod is perpendicular to the axis of symmetry of the lower hinge 6 connecting the static platform 1 and the lower limb 5 of the driving rod.
Embodiment approach 3
[0031] Please refer to the table above and Figure 4 As shown, when c≠d, the vertices of the static platform 1 are distributed on an ellipse, a≠b means that the vertices of the moving platform 2 are arranged on the circumference of the ellipse, and the driving rod includes the connected driving rod upper limb 4 and the driving rod lower limbs5. In this case, in the initial state, the major axis of the ellipse where the hinge 3 connecting the moving platform 2 and the upper limb 4 of the driving rod is perpendicular to the major axis of the ellipse where the hinge 6 connecting the static platform 1 and the lower limb 5 of the driving rod is perpendicular.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com