Automatic-navigation crawler-type mobile fruit picking robot and fruit picking method
A technology for picking robots and autonomous navigation, applied in the field of robots, to achieve the effects of reducing weight, improving navigation accuracy and saving costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with accompanying drawing:
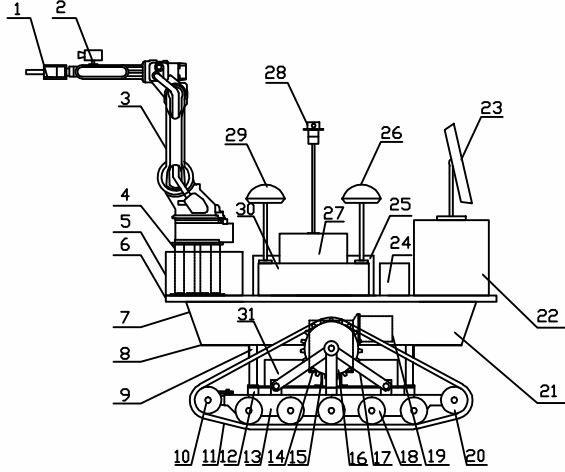
[0033] Such as figure 1 , the mobile fruit picking robot with autonomous navigation and automatic picking in this embodiment is mainly composed of a two-finger terminal picking manipulator 1, a binocular camera 2, a picking manipulator 3 with six degrees of freedom, a picking manipulator fixing base 4, a three-phase Isolation transformer 5, experimental equipment fixed frame 6, front box 7, box bracket 8, support column 9, tensioner 10, track 11, beam 12, track support beam 13, reducer 14, reducer fixing seat 15. Driving wheel 16, bearing support frame 17, load-bearing wheel 18, servo motor 19, guide wheel 20, rear box and side baffle 21, six-degree-of-freedom picking robot arm control cabinet 22, display 23, servo motor driver 24 , fruit collection box 25, GPS receiver I 26, industrial computer 27, monocular camera assembly 28, GPS receiver II 29, electrical cabinet 30, l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com