Wheel type mobile fruit picking robot and fruit picking method
A technology for picking robots and fruits, which is applied in the field of agricultural robots, can solve the problems of scattered fruits and low picking efficiency, and achieve the effect of reducing energy consumption and reducing damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with accompanying drawing:
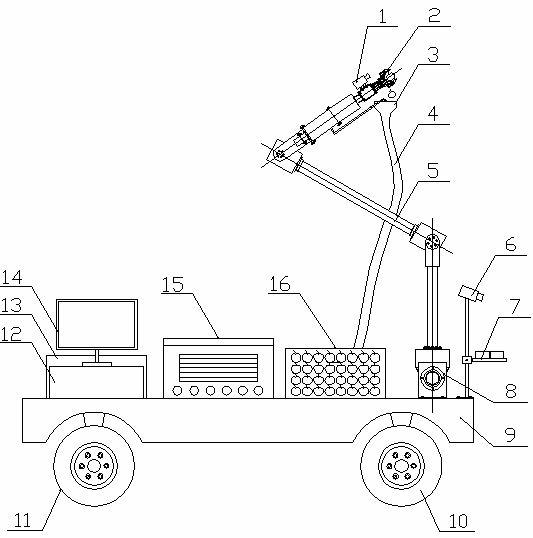
[0052] control figure 1 , the wheeled mobile fruit picking robot of this embodiment is mainly composed of a binocular camera 1, an underactuated picking manipulator 2, a fruit receiving basket 3, a fruit sliding pipeline 4, a picking manipulator 5, a monocular camera assembly 6, and an AHRS attitude and orientation reference system 7. Electric sliding table 8, side baffle 9, driving wheel 10, driven wheel 11, industrial computer 12, lithium battery power supply box 13, display 14, motor control cabinet 15, fruit collection box 16, etc.
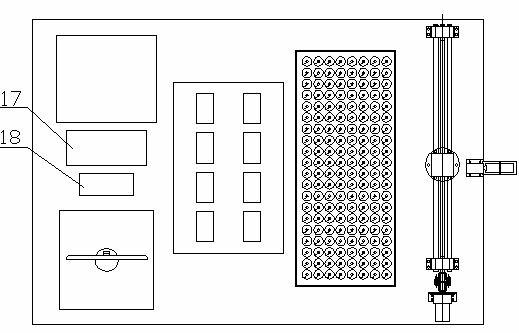
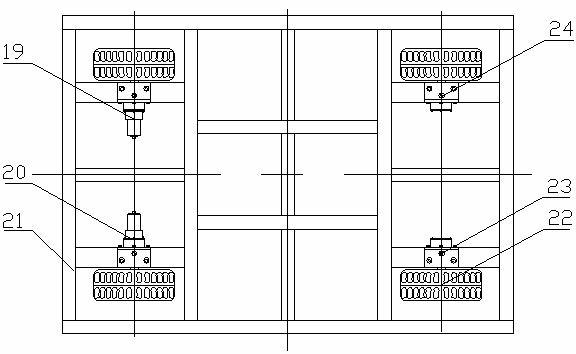
[0053] control figure 1 , figure 2 , image 3 and Figure 4 , the wheeled intelligent mobile platform includes a first driving wheel assembly (19), a second driving wheel assembly (20), a first driven wheel assembly (23), a second driven wheel assembly (24), a platform frame (21), and the side baffle (9), in which the first driving wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com