Camera calibration method and system for object three-dimensional geometrical reconstruction
A 3D geometry and calibration technology, which is applied in 3D geometric modeling, computer vision, computer image processing, and computer technology fields, can solve the problems that 3D reconstruction technology is not suitable for 3D reconstruction, difficult to apply 3D reconstruction technology, etc., to achieve reliable algorithms, Effects with a wide range of uses and a simple reconstruction process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be described in more detail below through specific embodiments in conjunction with the accompanying drawings.
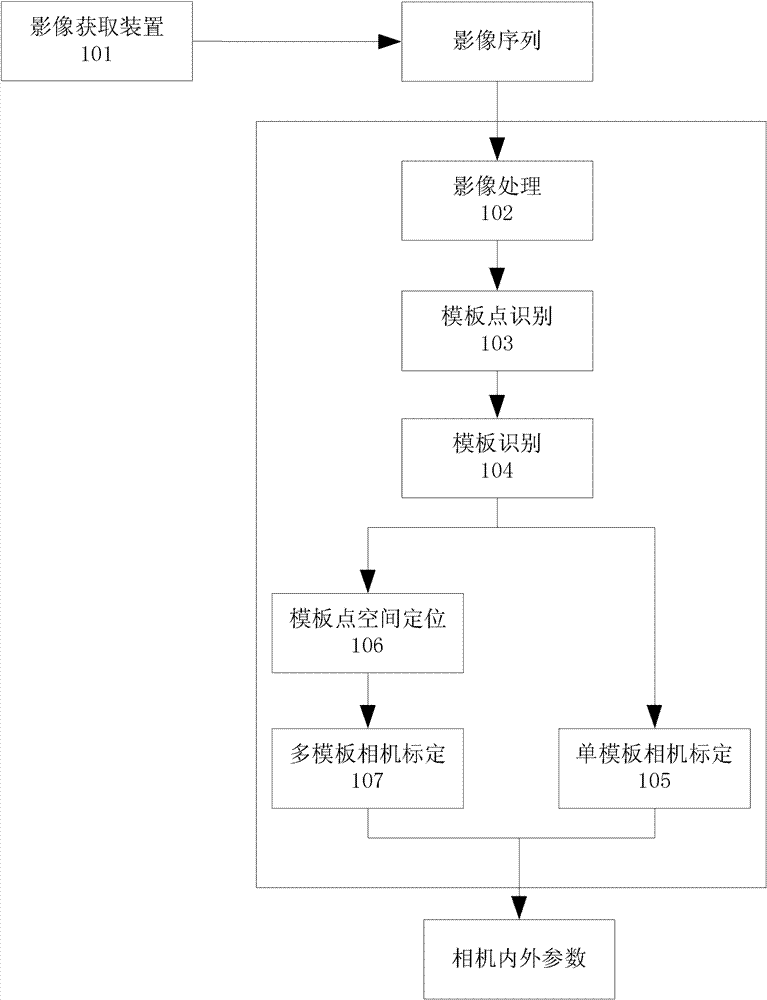
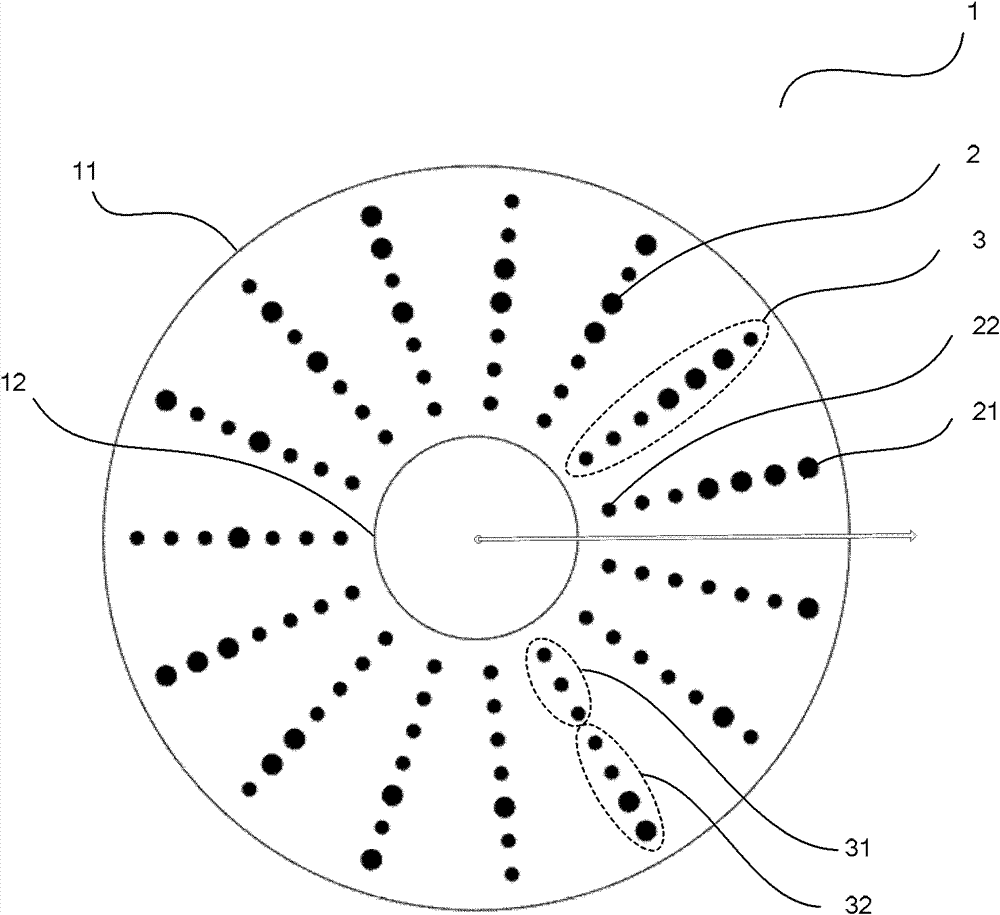
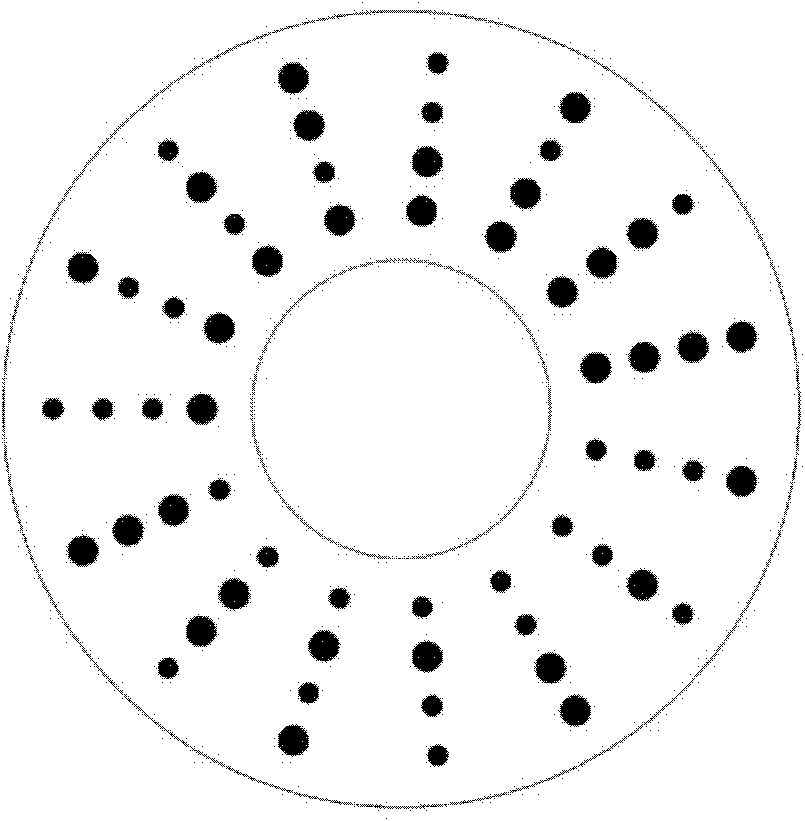
[0070] The following embodiment provides a camera calibration method, generally speaking, the method includes the following aspects: a calibration template encoding method, used for identification of calibration templates during three-dimensional reconstruction of large, medium and small objects; The calibration template layout and image acquisition method are used to arrange the calibration template in the scene containing the three-dimensional object to be reconstructed and obtain a series of images; the image processing method processes the acquired images to obtain all visible calibration templates in the image The calibration point outline; the calibration point recognition method is used to identify and distinguish template calibration points and template calibration point groups from the contour set; the template recognition me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com