Frog jump robot
A robot, frog-like technology, applied in the field of jumping robot devices, can solve the problems of limiting the range of motion of the robot's legs, limiting the range of the robot's activities, reducing the energy utilization rate, etc., to achieve light weight, improve control effects, and increase precision. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
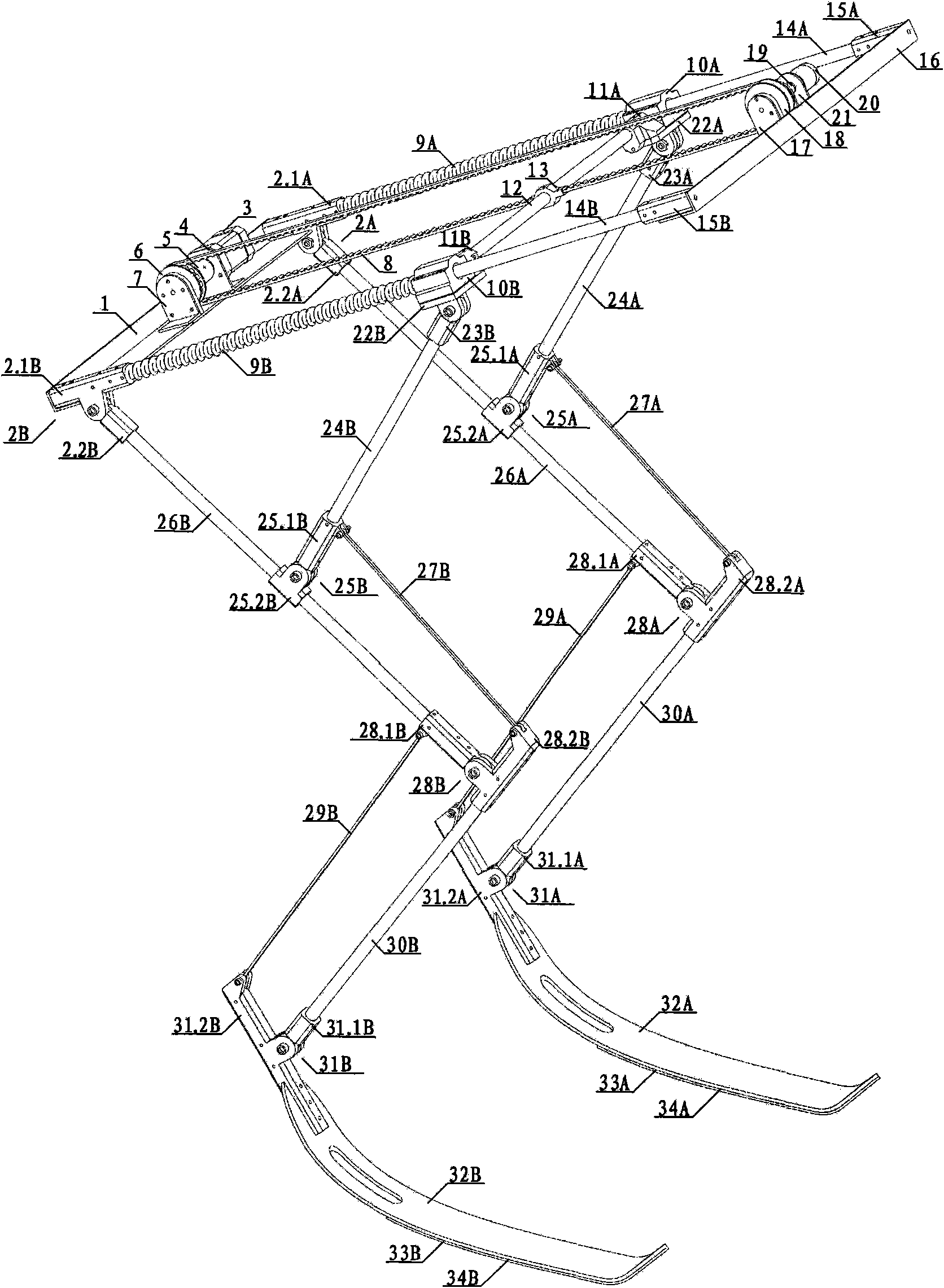
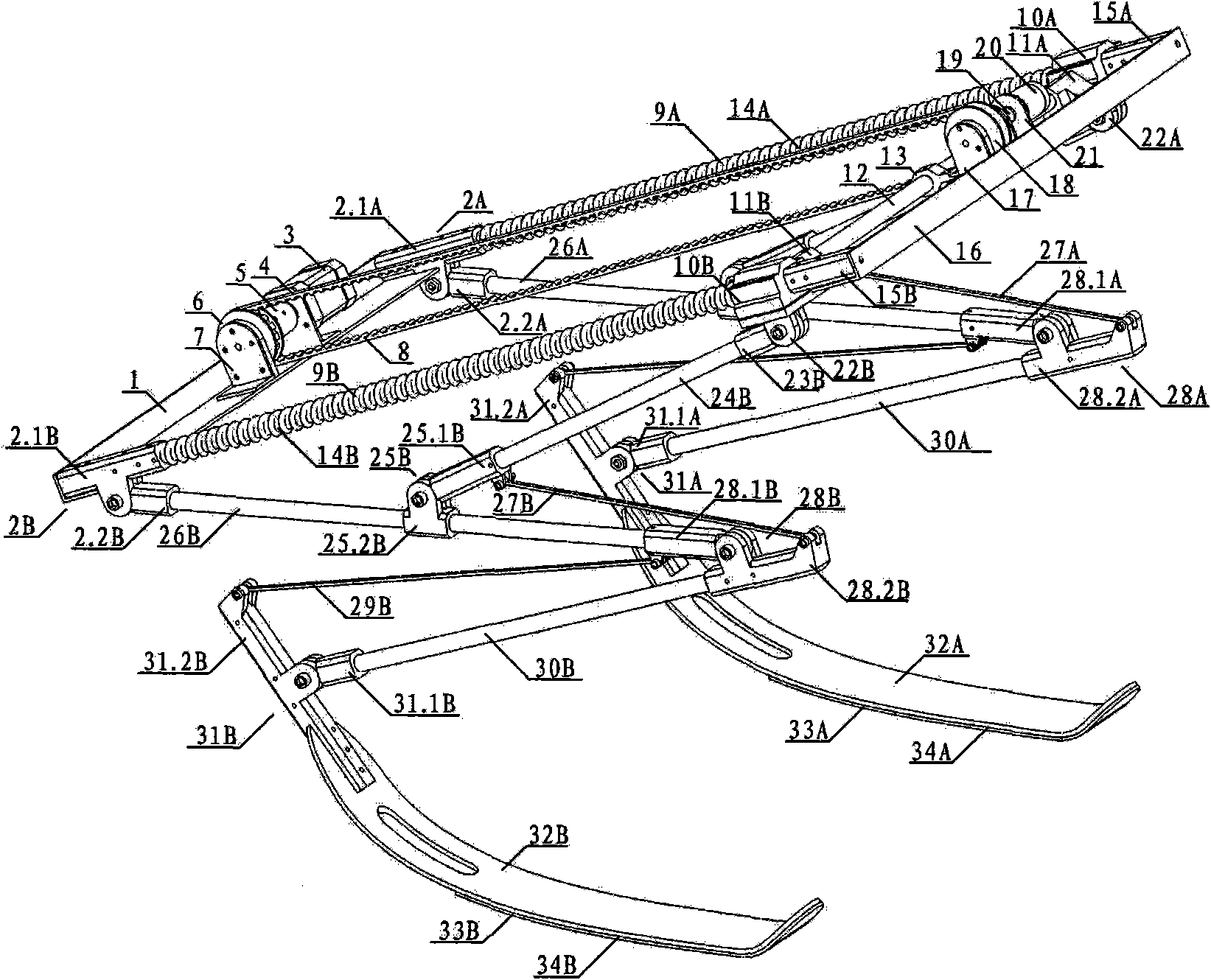
[0046] Device embodiment: such as figure 1 Shown, a kind of frog jumping robot of the present invention comprises: a power mechanism: mainly by motor 3, overrunning clutch 6, toothed belt 8, pulley 18, encoder 20, slide bar 12, slide block 10, guide rail 14 and tension spring 9 form. Motor seat 4 and clutch seat 7 are housed on the rear bracket 1, motor 3 and overrunning clutch 6 are respectively fixed on motor seat 4 and clutch seat 7, motor 3 and overrunning clutch 6 are connected by shaft coupling 5 coaxially. Both ends of the rear bracket 1 are fixedly connected to the hip joint sleeve 2.1 respectively. Encoder seat 21 and pulley seat 17 are housed on the front support 16, encoder 20 and overrunning clutch 6 are respectively fixed on encoder seat 20 and pulley seat 17, belt pulley 18 links to each other with overrunning clutch 6 by toothed belt 8....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com