Wire-driven redundant parallel masticatory robot
A masticating robot and cable-driven technology, applied in the field of bionic robots, can solve problems such as small working space, poor flexibility, and complex structure, and achieve the effect of large working space, good flexibility, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
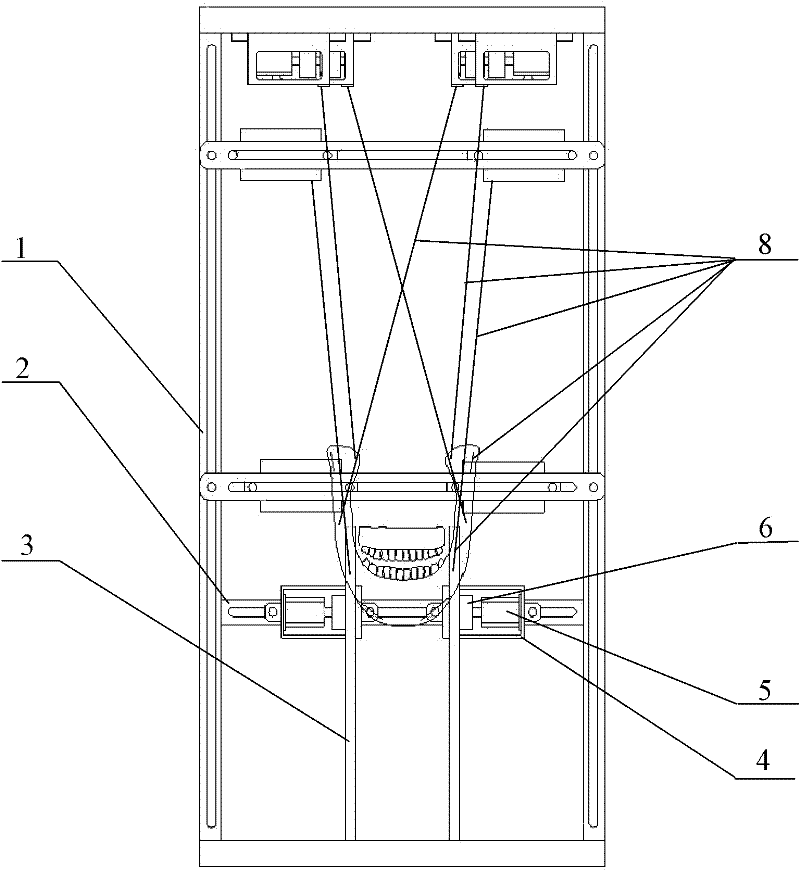
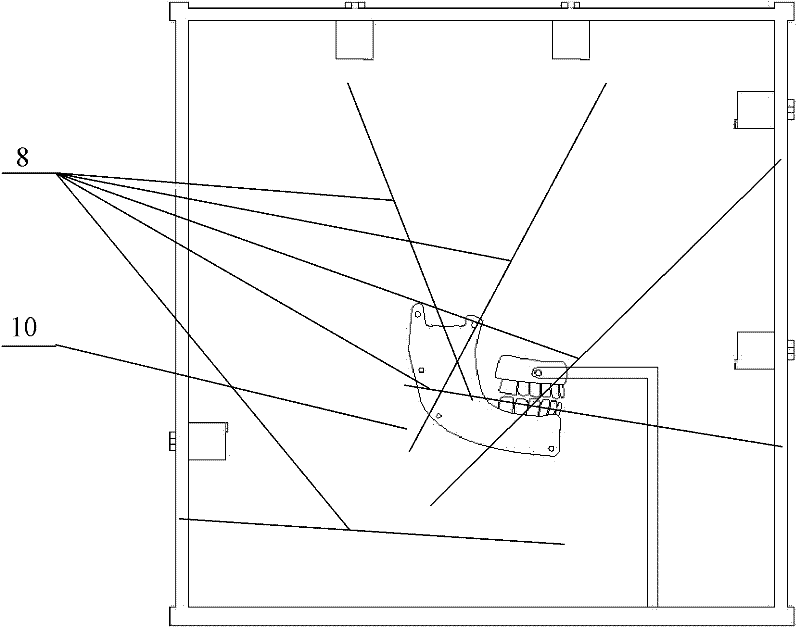
[0023] The chewing robot is composed of a frame, a drive module, flexible cables, a mandible model and a skull tooth model. The frame part of the robot is as Figure 1a As shown, the robot frame 1 is a cuboid frame structure, the left and right sides are square, and the rest are rectangular. A U-shaped slideway is arranged on the front, back and top surface of the frame, and a fixed support 3 is arranged on the bottom surface. 5 crossbeams 2 are installed on the frame, each two on the front and the top surface, and one on the back. There are holes at both ends of the crossbeam 2, and there is a U-shaped slideway in the middle, which is fixed on the slideway of the frame by bolts 12 and nuts 13 as shown in Figure 7, and the position can be adjusted according to different situations. The slideway on the crossbeam is used for installing the motor seat 4, and the position is also adjustable. The fixed bracket 3 is two protruding beams of L-shaped structure, one end is fixed on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com