Six-degree-of-freedom flexible mechanical arm based on pneumatic muscles
A technology of mechanical arms and pneumatic muscles, applied in the field of bionic robots and rehabilitation robots, to achieve the effects of easy control, high precision and novel structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
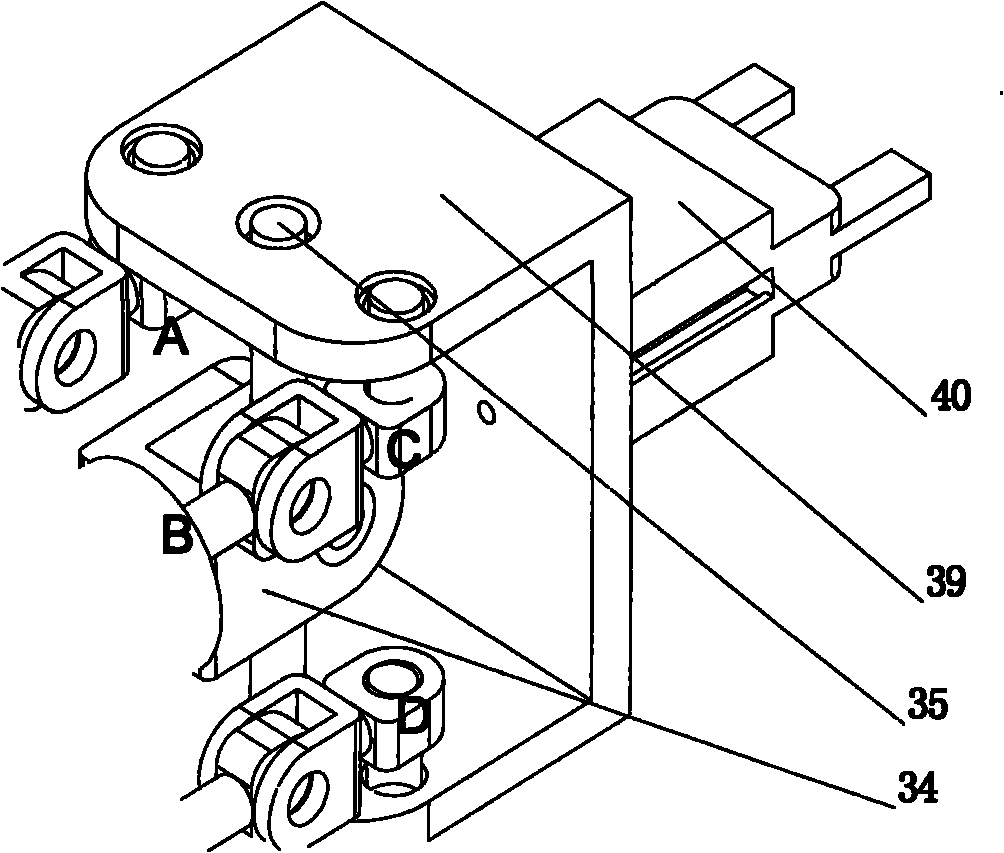
[0012] Such as Figure 1~3 As shown, the six-degree-of-freedom flexible robotic arm based on pneumatic muscles includes a fixed platform 1, a shoulder joint 2, an elbow joint 3, a wrist joint 4, a shoulder joint drive 11, an elbow joint drive 12, a wrist joint drive 13, and a shoulder joint drive 11 includes the first pneumatic artificial muscle 5, the second pneumatic artificial muscle 6, the third pneumatic artificial muscle 7, the fourth pneumatic artificial muscle 8, the fifth pneumatic artificial muscle 9, the sixth pneumatic artificial muscle 10, and the elbow joint drive 12 includes the first pneumatic artificial muscle The seventh pneumatic artificial muscle 14, the eighth pneumatic artificial muscle 15, the ninth pneumatic artificial muscle 16, the tenth pneumatic artificial muscle 17, the wrist joint drive 13 includes the eleventh pneumatic artificial muscle 18, the twelfth pneumatic artificial muscle 19, the tenth The third pneumatic artificial muscle 20, the fourte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com