Operation device of radio frequency electrode ablation catheter handle
A technology for manipulating devices and ablation catheters, which is applied in the fields of surgery, medical science, heating surgical instruments, etc., can solve the problems of difficult operation and difficult control of precision, and achieves the effect of avoiding human error, reducing proficiency requirements, and increasing flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
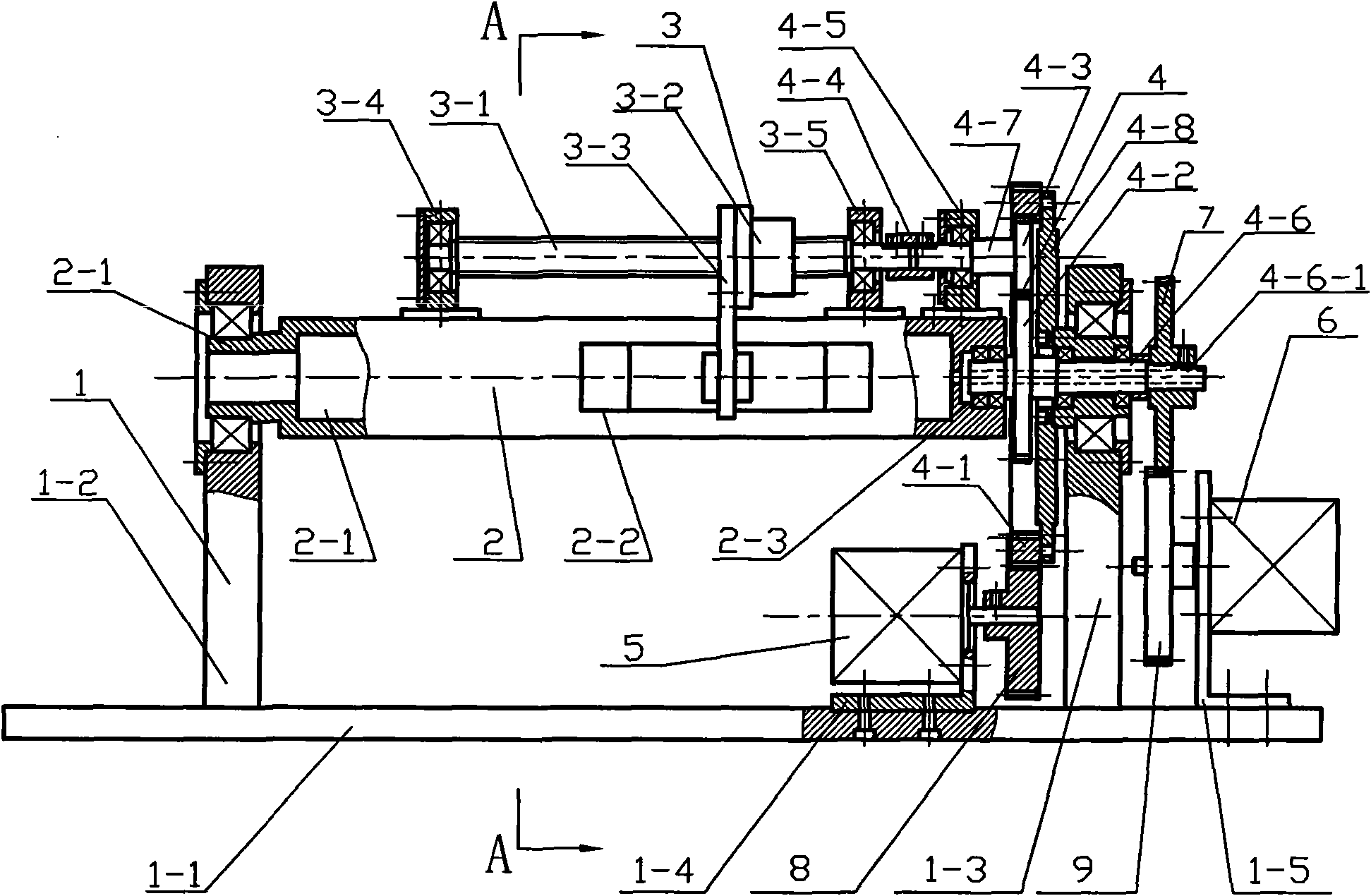
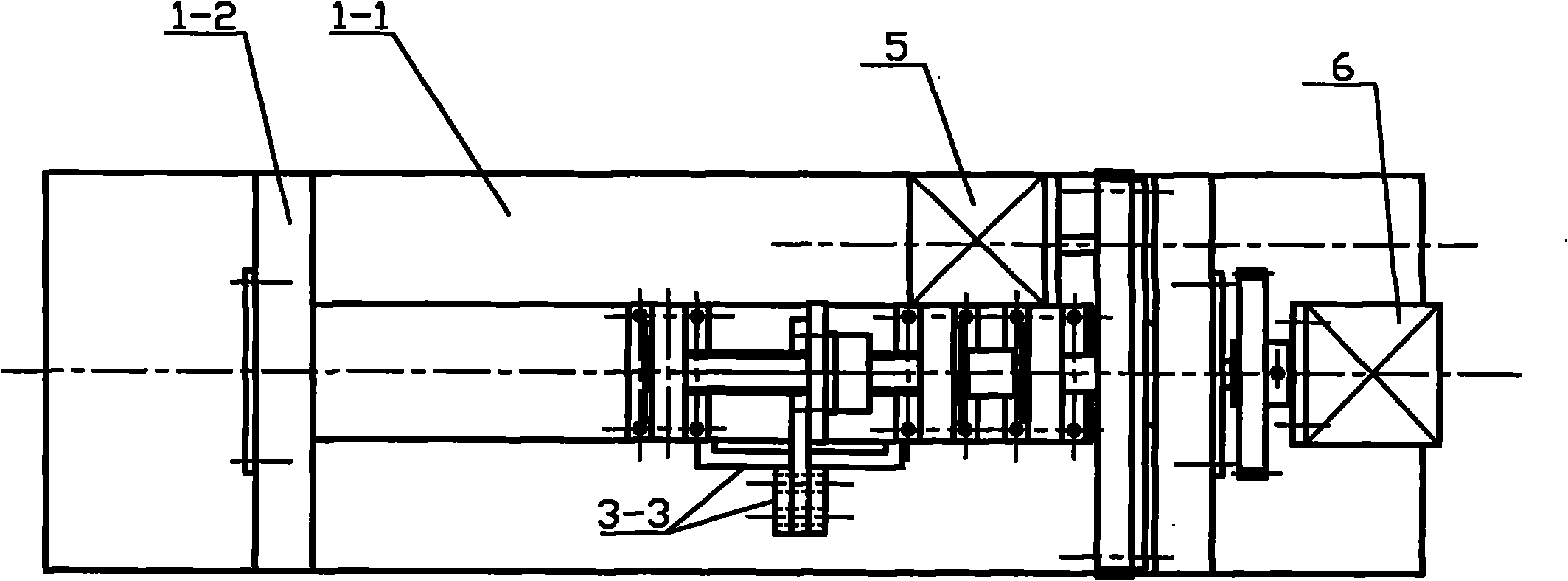
[0008] Specific implementation mode one: as Figure 1~4 As shown, the manipulating device of a radiofrequency electrode ablation catheter handle according to this embodiment includes a base bracket assembly 1, a first driving motor 5, a second driving motor 6, a transmission gear 7, a first motor gear 8 and a second The motor gear 9, the manipulating device also includes a catheter handle clamping part 2, a ball screw nut mechanism 3 and a differential planetary gear train mechanism 4; one end surface of the catheter handle clamping part 2 is provided with a groove along the length direction 2-1, the groove 2-1 is used to install the catheter handle, and a rectangular through hole 2-2 is opened on the side wall of the catheter handle clamping part 2 opposite to the opening of the groove 2-1, and the catheter handle One end of the clamping part 2 is in the shape of a shaft, and the end face of the other end of the catheter handle clamping part 2 is provided with a blind hole 2-...
specific Embodiment approach 2
[0013] Specific implementation mode two: as figure 1 As shown, the base bracket assembly 1 in this embodiment consists of a base plate 1-1, a first column 1-2, a second column 1-3, a first drive motor seat 1-4 and a second drive motor seat 1-5 The first driving motor seat 1-4 and the second driving motor seat 1-5 are both L-shaped, and the first column 1-2 and the second column 1-3 are respectively fixed on both sides of the upper end surface of the bottom plate 1-1. , the first drive motor seat 1-4 and the second drive motor seat 1-5 are fixedly connected to the upper end surface of the base plate 1-1. With such an arrangement, the structure is simple, and the manipulation of the catheter handle is facilitated. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0014] Specific implementation mode three: as figure 1 As shown, the manipulation device in this embodiment also includes a second screw support 3-5, one end of the screw 3-1 is mounted on the second screw support 3-5 through a rolling bearing, and the second screw support 3 -5 is fixed on the outer wall of the catheter handle clamping part 2. Such setting makes the ball screw nut mechanism 3 run more smoothly. Other compositions and connections are the same as those in Embodiment 1 or 2.
[0015] work process (see Figure 1~4 ):
[0016] The invention can automatically control the bending deflection of the distal end of the catheter and the rotation of the handle along the axis:
[0017] If it is necessary to realize the bending of the catheter head, the first drive motor 5 drives the outer sun gear 4-1 in the differential planetary gear mechanism 4 to rotate through the first motor gear 8, and the second drive motor 6 passes through the second motor gear 9 And the trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com