Operant conditioning reflex automatic machine and application thereof in control of biomimetic autonomous learning
A technique for manipulating conditioned reflexes, automata, applied in the field of bionic automata
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0047] Embodiment one: if Figure 4 , 5, Skinner's operant conditioning pigeon experiment.
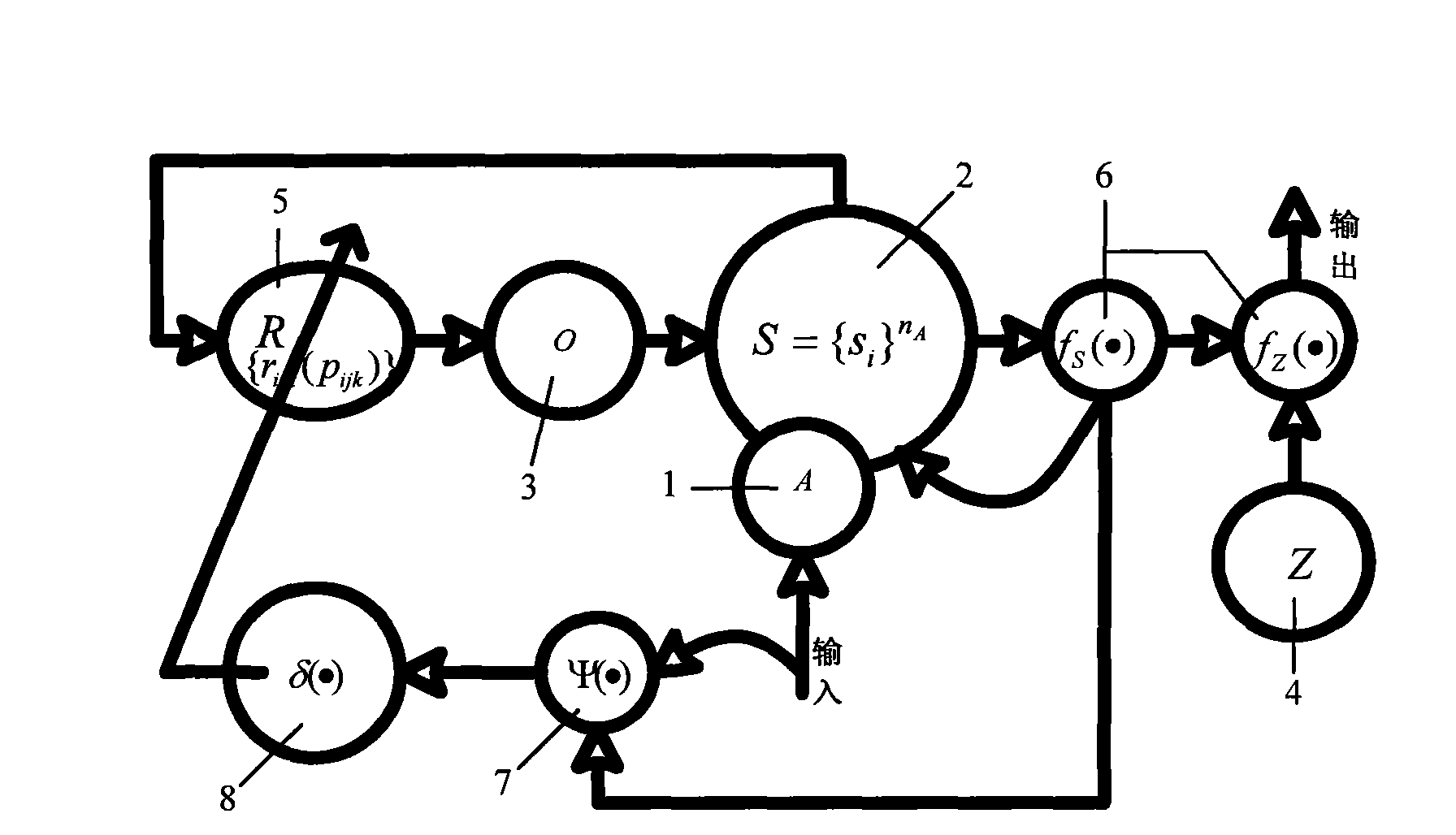
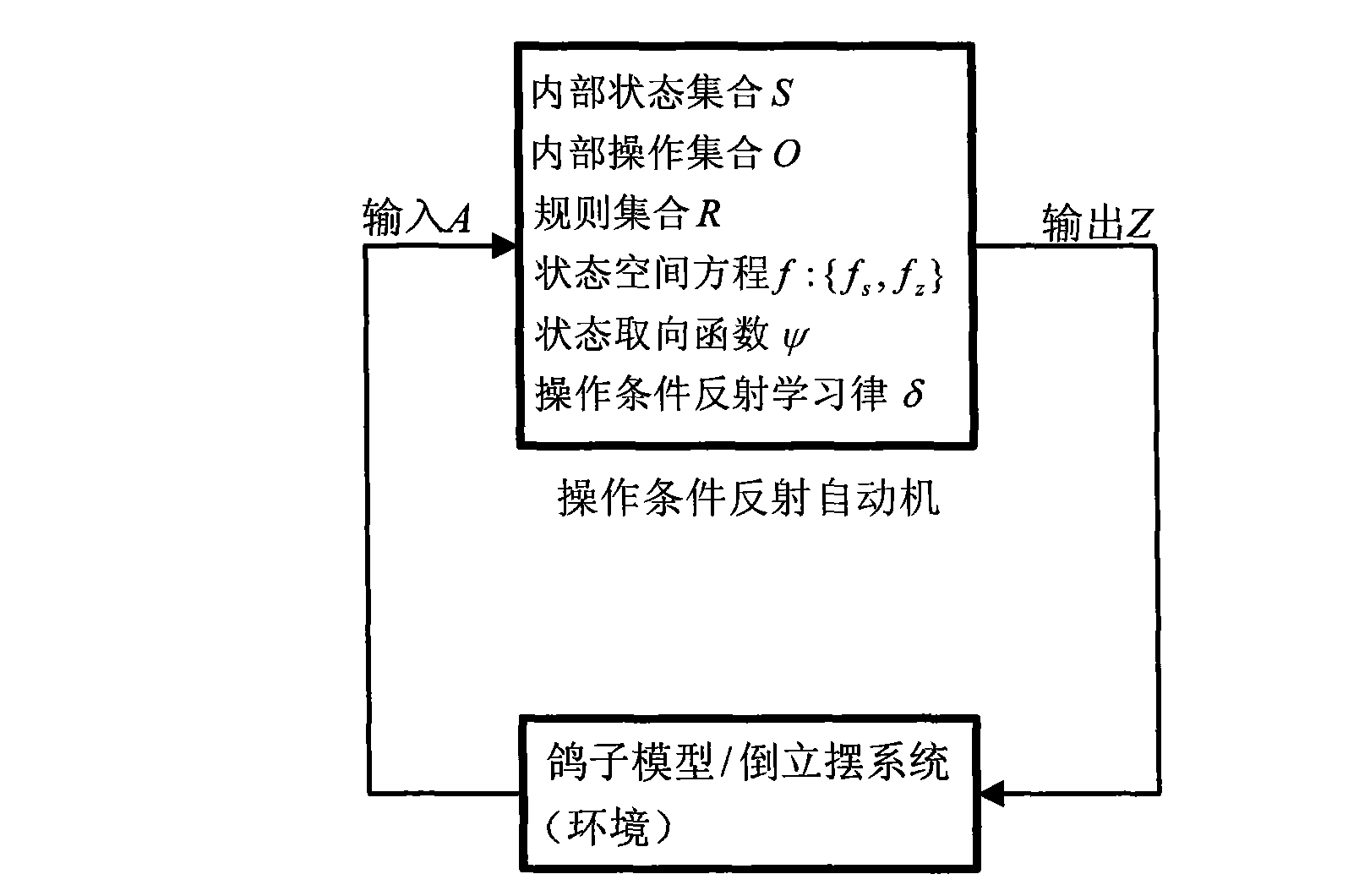
[0048] The goal of Skinner's pigeon experimental training is to make it learn the behavior of pecking the red button. It gets food when it pecks the red button (positive reinforcement), nothing when it pecks the yellow button, and an electric shock when it pecks the blue button (negative reinforcement). Experiments were carried out using the Skinner operator conditioned reflex automata model method, such as figure 1 , 2 , 3 shown.
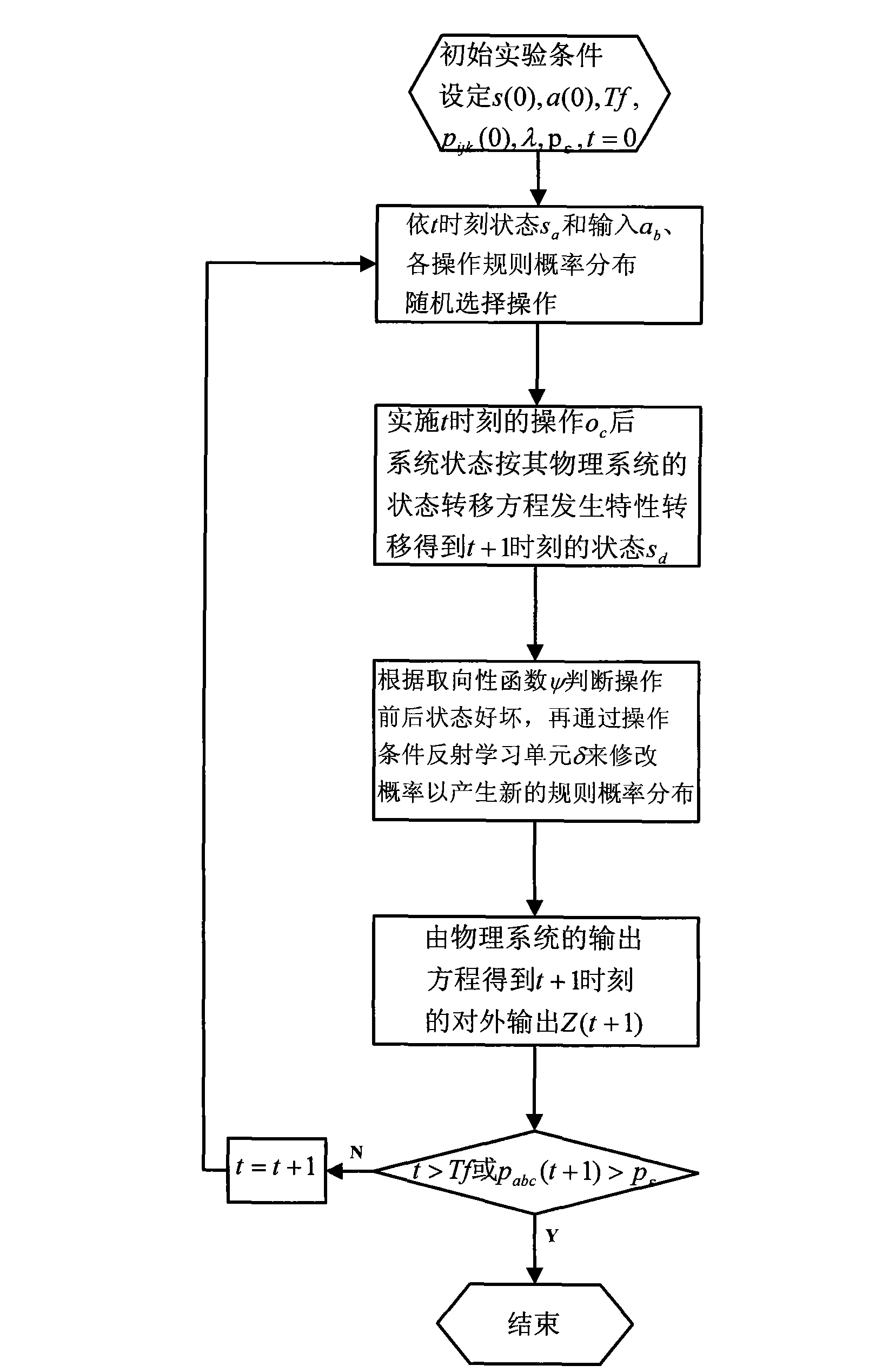
[0049] Firstly, the simplified discrete mathematical model of the pigeon experiment is given: suppose the pigeon has three states: hungry state, half-starved state and zero-starved state. When the pigeon is in a hungry state, when it is given food, the state changes to half-starved. When the pigeon is not given food or given electric shock stimulation, the pigeon is still in a hungry state, and the output is the state of the pigeon at this time; when th...
Embodiment 2
[0077] Embodiment 2: As shown in Figures 6-7, a balance control experiment of a single-stage inverted pendulum.
[0078] The goal of inverted pendulum control is to apply a force u (control amount) to the base of the trolley, which is the set of operation symbols O, that is, u=o k , k=1, 2, ..., n o . Finally, it is guaranteed that the pole does not fall down, that is, it does not exceed a predefined vertical deviation angle range. The control experiment is carried out by using Skinner's method of manipulating the conditioned automata model, such as figure 1 , 2 , 3 shown.
[0079] An inverted pendulum can be described by the following equations of motion
[0080] θ · · = m ( m + M ) gl ( M ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com