Autonomous identifying method of hazardous article target
A dangerous goods and target technology, applied in the direction of measuring devices, instruments, radio wave measurement systems, etc., can solve the problems of single target identification, narrow detection range, and inability to find dangerous targets in a more timely manner, achieving the effect of high identification accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] Describe the present invention in detail below in conjunction with embodiment and accompanying drawing. The embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and processes. However, the protection scope of the claims of the present invention is not limited to the following examples.
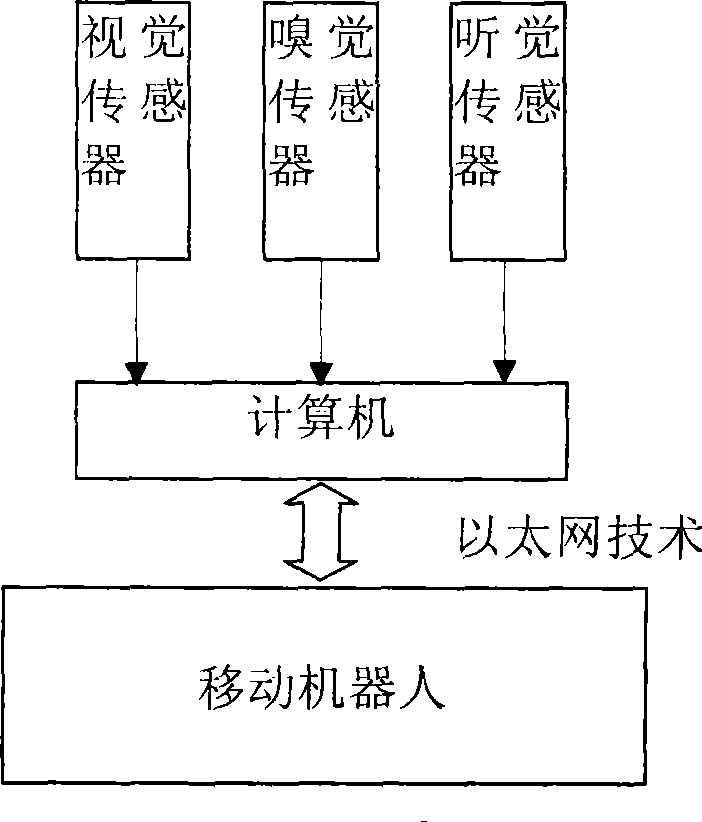
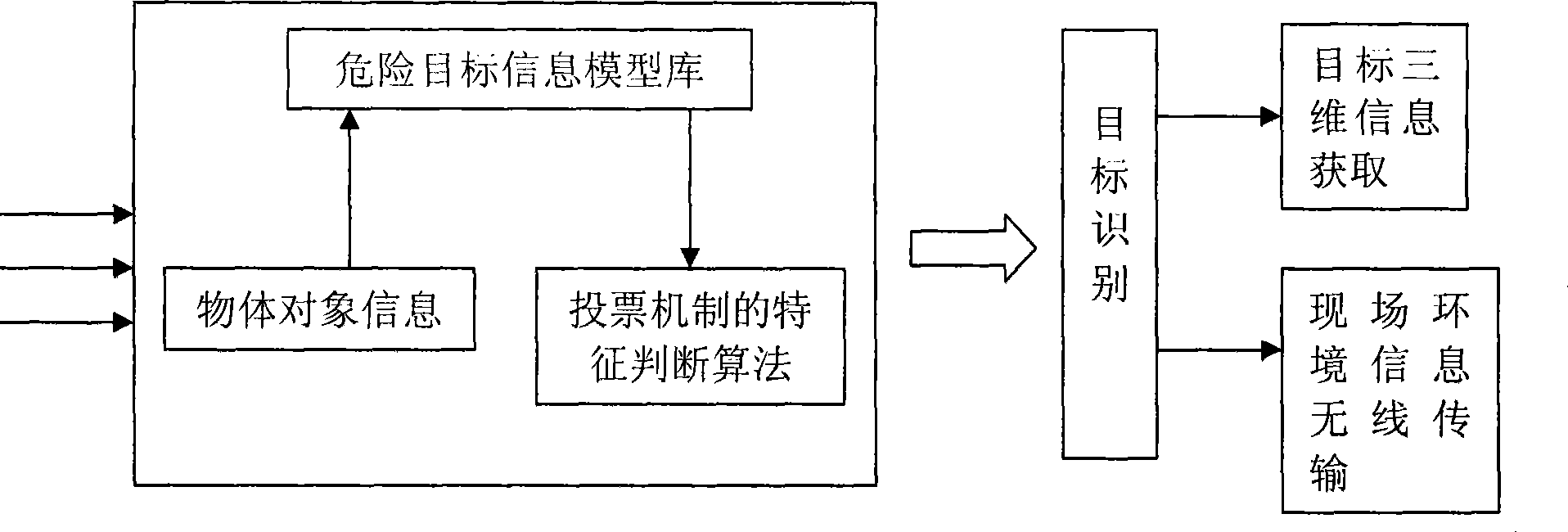
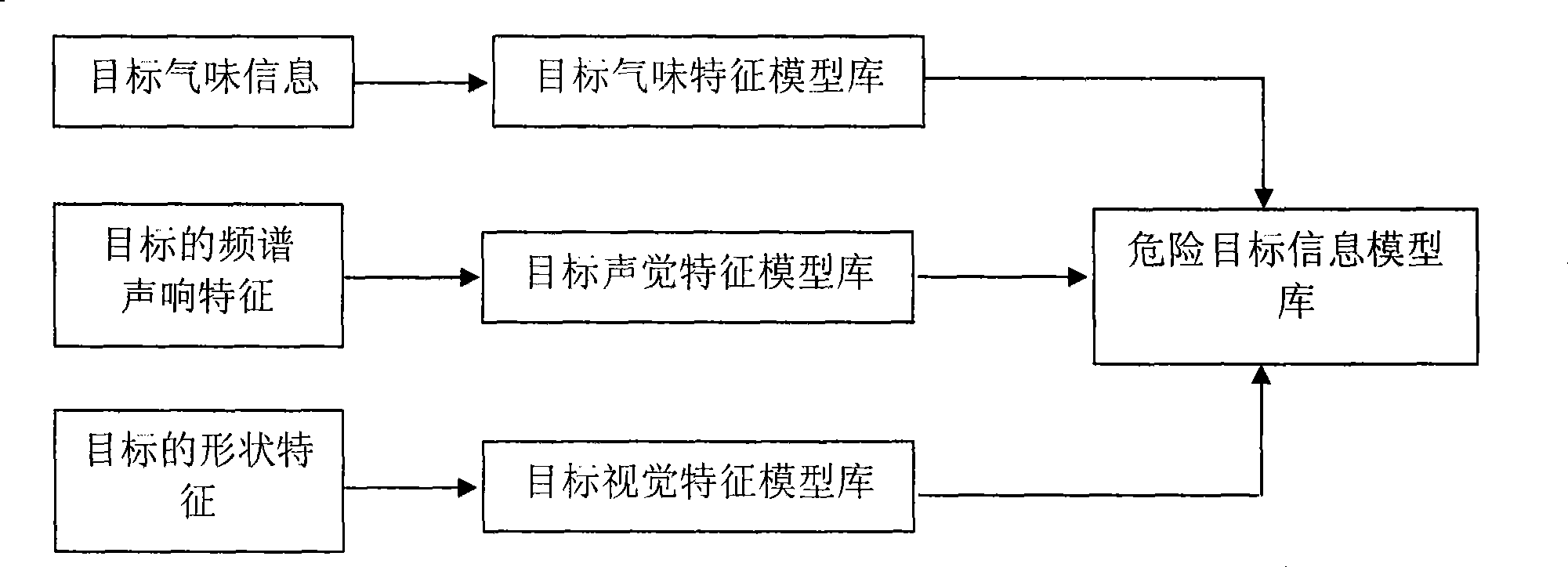
[0012] A method for autonomous identification of dangerous goods targets designed by the present invention (hereinafter referred to as the method, see figure 1 —4), the method is based on the multi-sensory mobile robot of smelling, seeing and hearing. The multi-sensory mobile robot is a multi-sensory system composed of a mobile robot chassis and its control system, a gas sensor array, an acoustic sensor array, a stereo vision camera, and a computer used to control these sensors. The multi-sensory system and the mobile robot chassis communicate through Ethernet technology for information exchange. Acc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com