Robot ambulation control method based on confirmation learning theory
A technology that determines the learning theory and walking control. It is applied in two-dimensional position/channel control, adaptive control, general control system, etc., and can solve the problems of huge calculation, time and energy waste.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0071] Embodiment: The tracking control problem of 5-link planar robot to desired gait
[0072] (1) 5-link planar robot system model
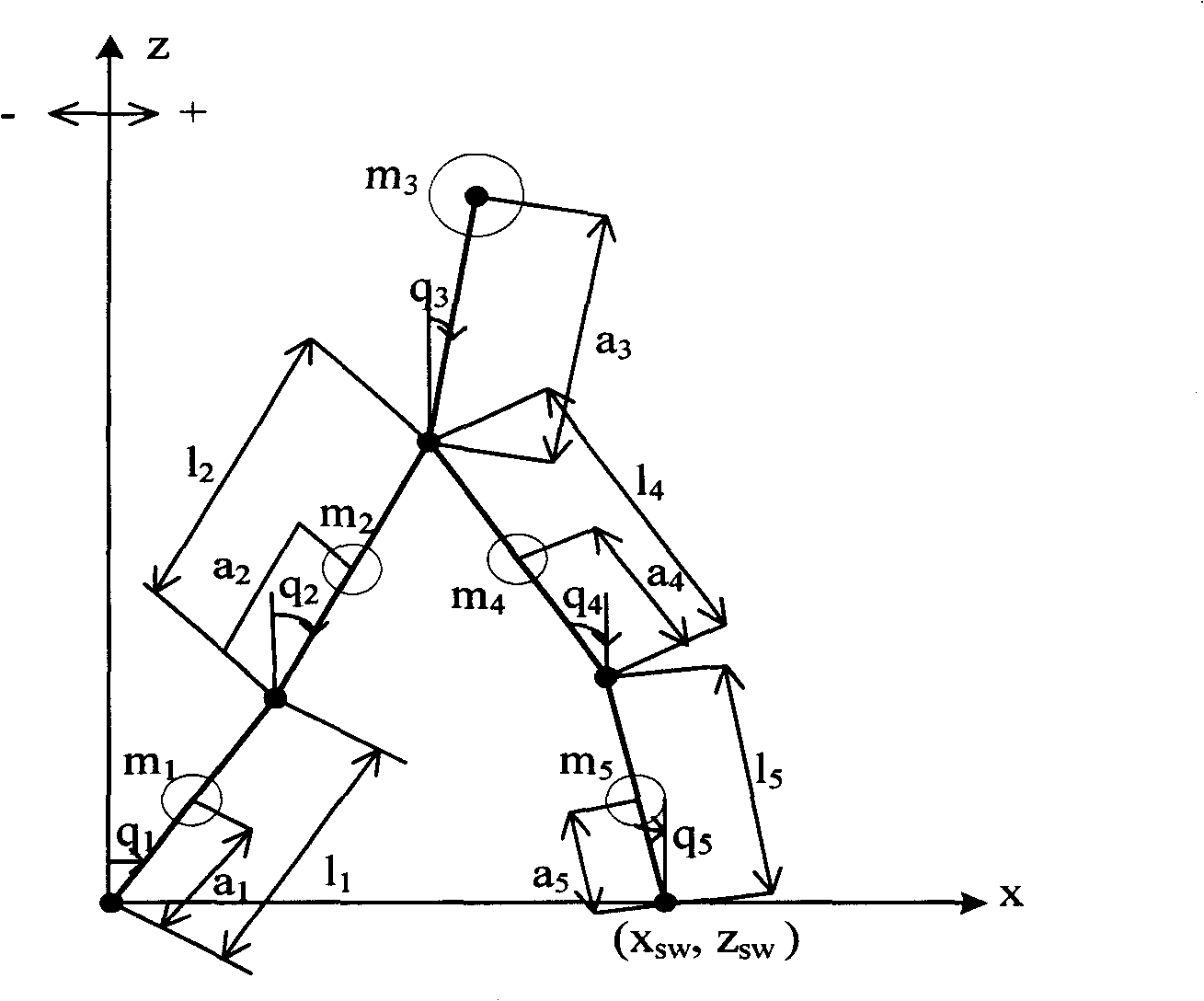
[0073] The structure of the 5-link planar robot is as follows: figure 1 As shown, where x represents the distance the robot advances, z represents the height, and m 1 ~ m 5 Indicates the mass of each connecting rod, l 1 ~ l 5 Indicates the length of each connecting rod, q 1 ~q 5 Indicates the joint angle of each joint point, a 1 ~a 5 Indicates the distance from the center of gravity of each link to the joint point, x sw ,z sw is the trajectory position of the end of the robot’s dancing legs. The robot is composed of 5 connecting rods. Sensors are installed at the end points of the landing and each joint point of the connecting rods to measure the joint angular position. The controller outputs the torque and calculates the angular velocity through the joint angle. The dynamic model of its walking is as follows:
[0074] Single foot su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com