Combined method of magnetic field and vision for locating gesture of medical micro type robot in vivo
A micro-robot, combined technology, used in sensors, medical science, diagnostic recording/measurement, etc., can solve problems such as shortening the time of in vivo traversal examinations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
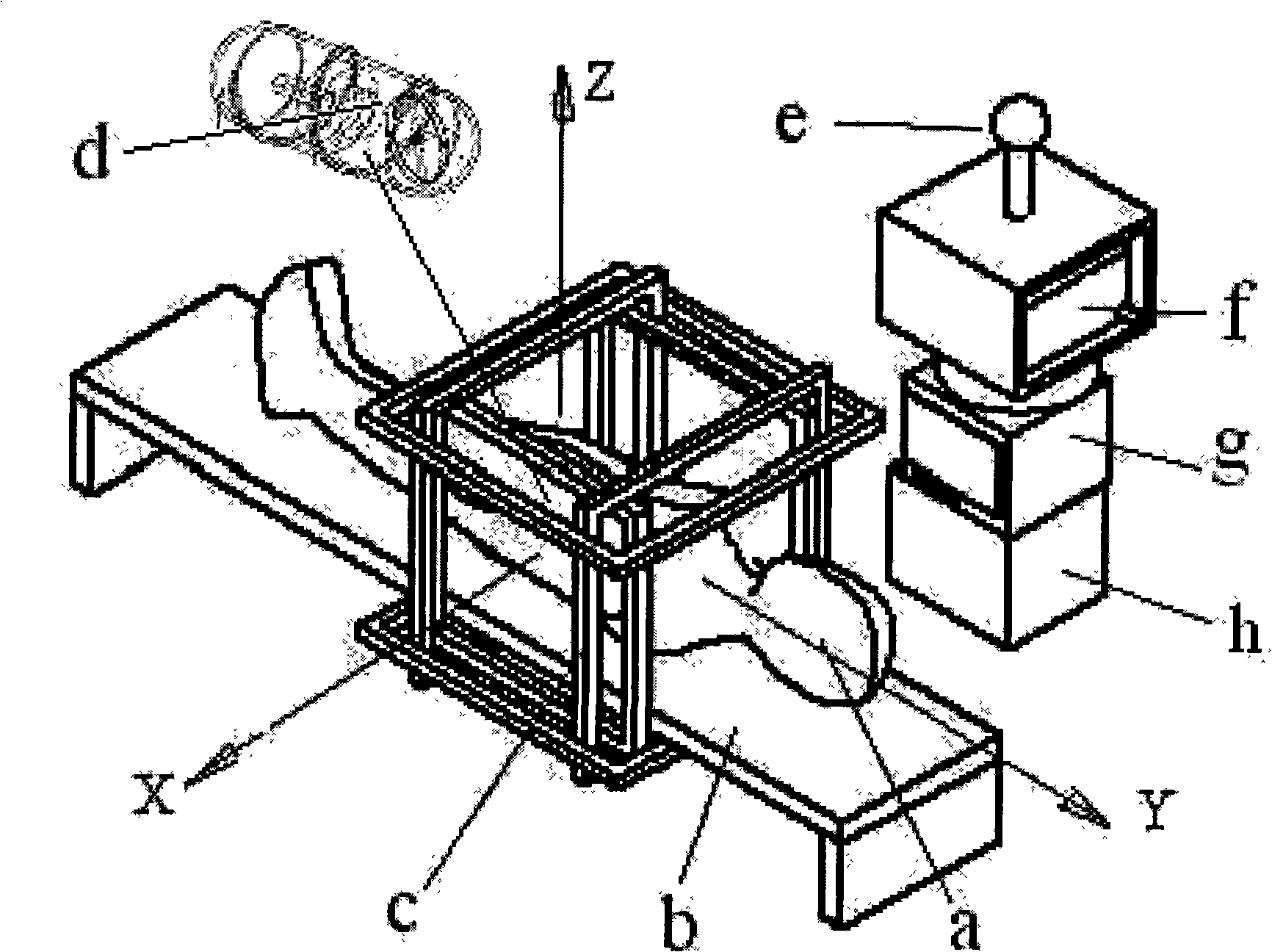
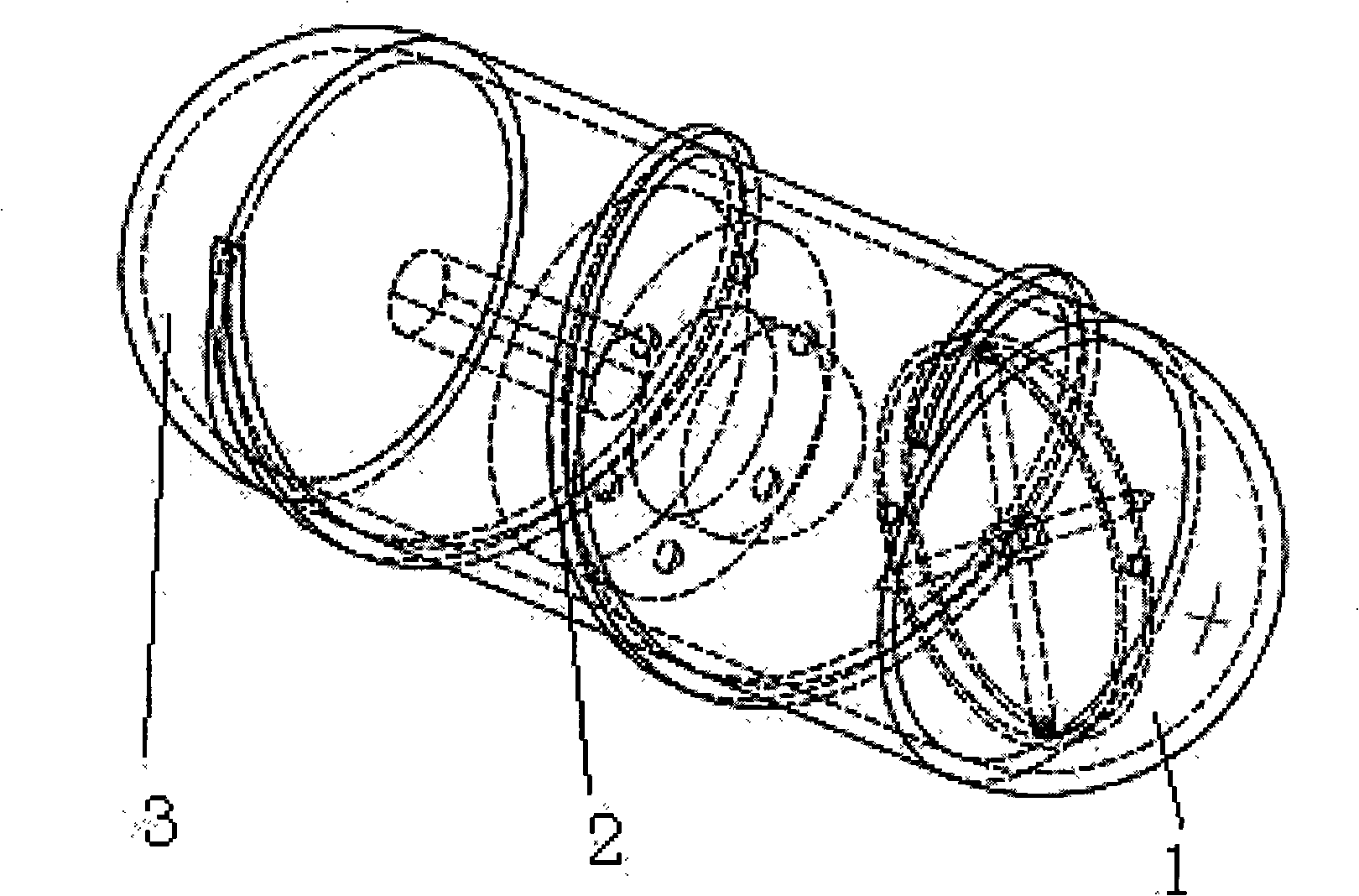
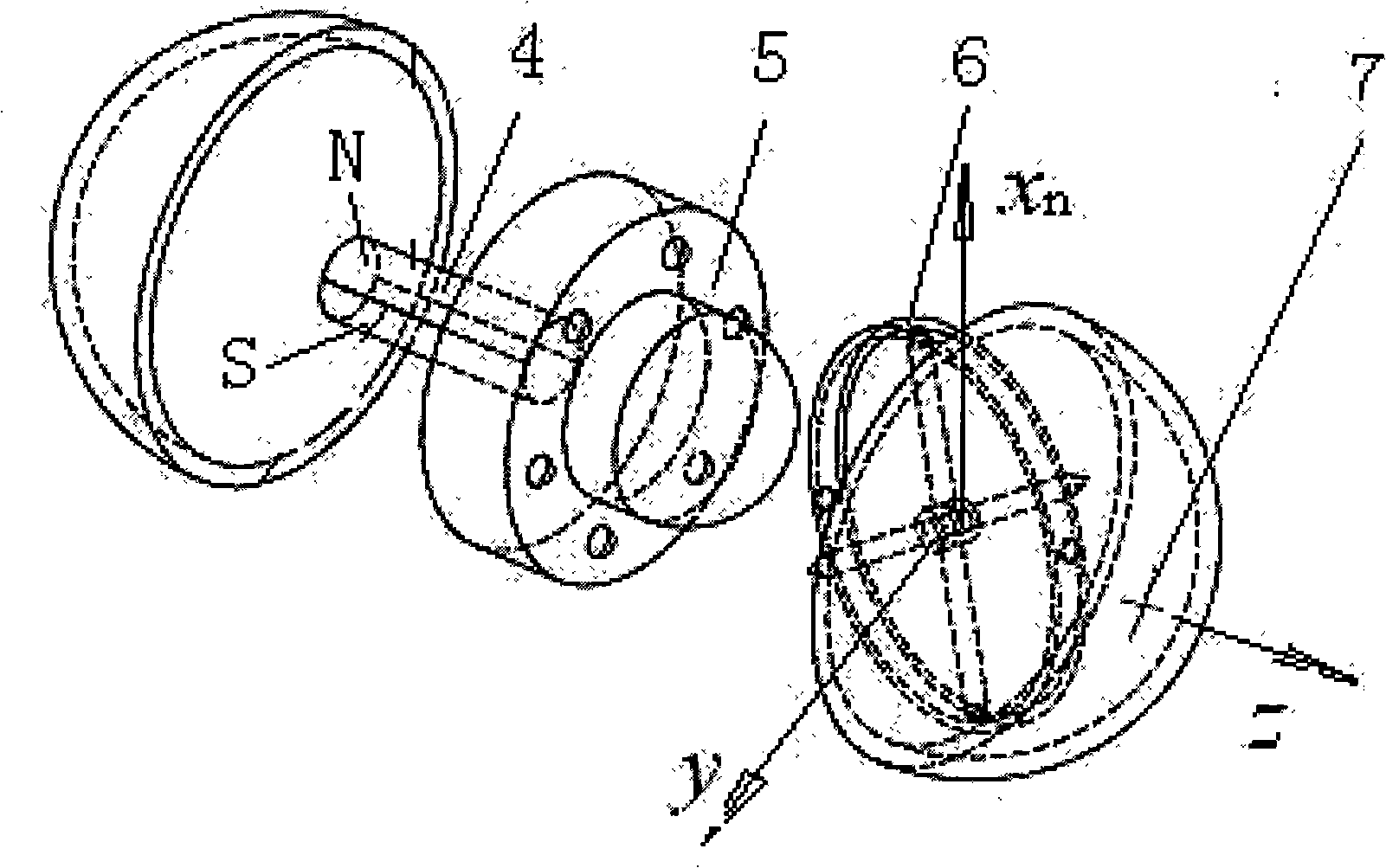
[0051] combined with Figure 5 , the robot azimuth attitude detection system consists of a rocker attitude detection device (including a joystick handle e and an inclination sensor f), an attitude detection system controller g, an external magnetic field driver h, and a robot embedded detection system d three-axis orthogonal nesting The mholtz coil magnetic field superposition device c consists of five parts. The robot embedded detection system d includes a micro camera and a wireless video transmission device 5 , a small universal magnetic needle 6 and an axis mark 7 .
[0052] Specific steps are as follows:
[0053] 1. Plan the space enclosed by the three-axis orthogonally nested Helmholtz coil groups to accommodate the human body and the hospital bed; the installation plan for the three sets of Helmholtz coil groups to be orthogonally nested in order from large to small, Complete matching design. When the three sets of Helmholtz coils are applied with the same DC current...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com