Three freedom shoulder, elbow joint force feedback type healing robot
A rehabilitation robot and elbow joint technology, applied in the field of robotics, can solve the problems of lack of mechanical detection, small number of degrees of freedom, and small movement space
Inactive Publication Date: 2008-10-22
HARBIN ENG UNIV
View PDF0 Cites 27 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The characteristics of rehabilitation robots currently on the market are: mainly used for single-joint rehabilitation training, few degrees of freedom, small movement space, and lack of mechanical testing, etc.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
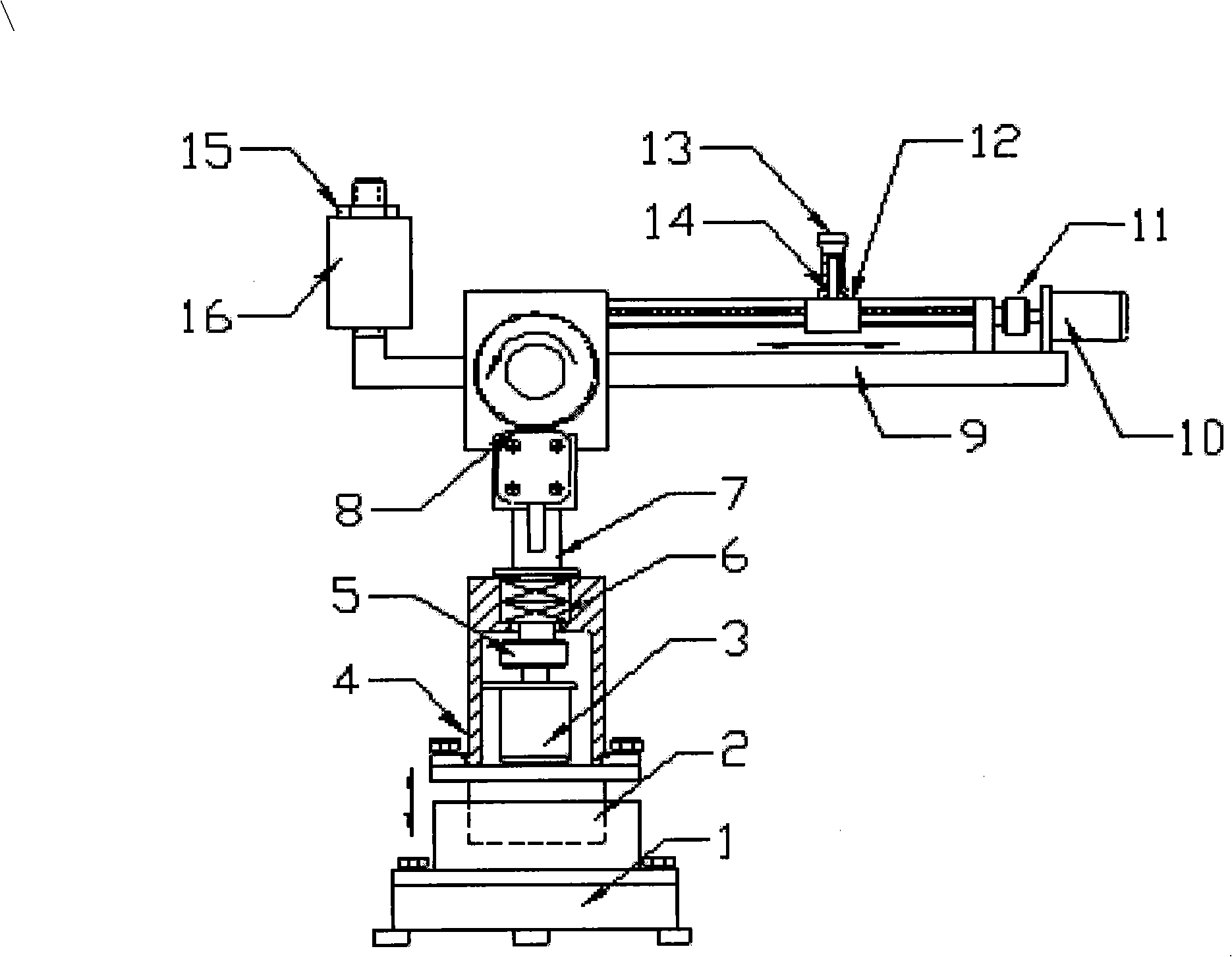
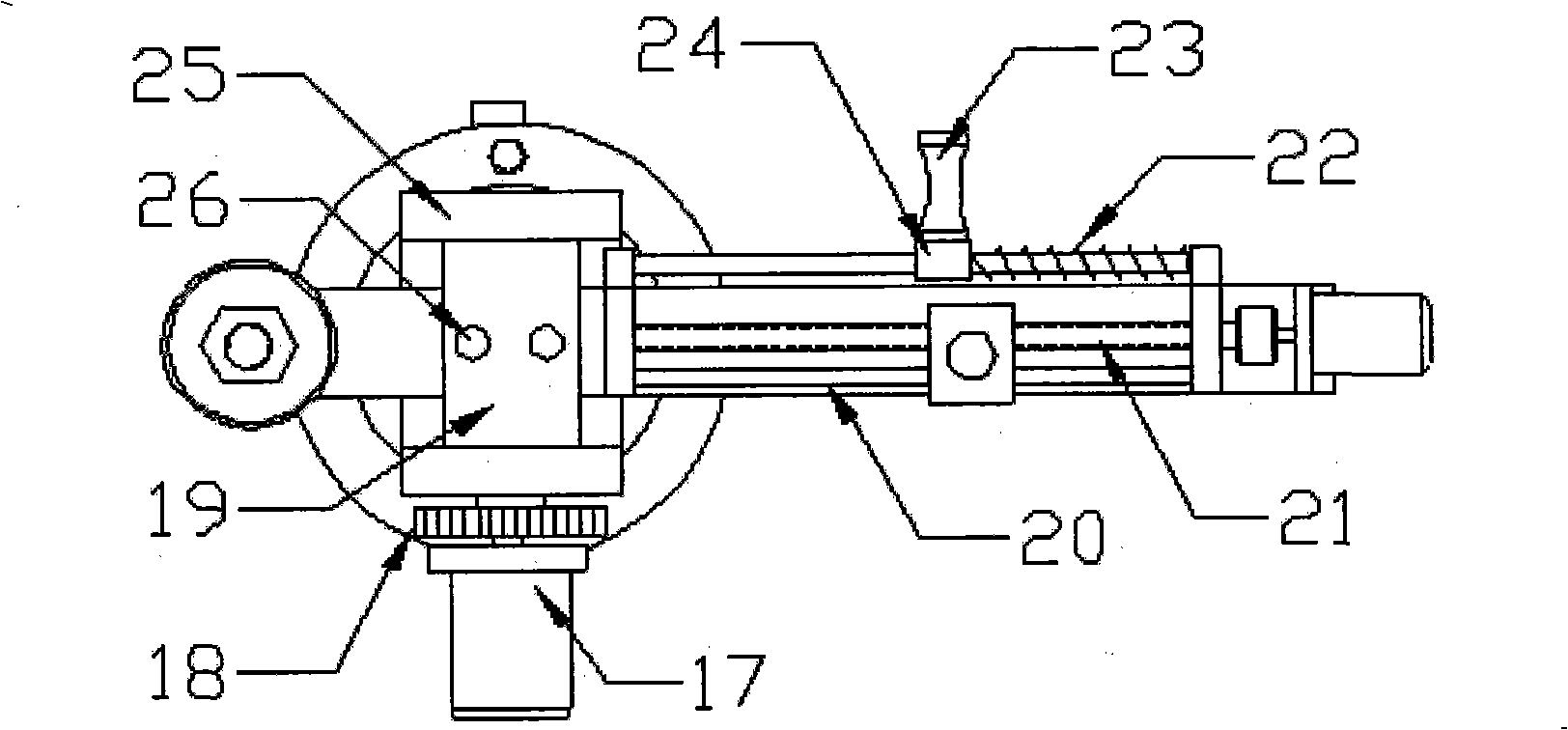
The invention provides a force feedback rehabilitation robot of shoulder joint and elbow joint with three degrees of freedom. The rehabilitation robot comprises a base, a straight motor arranged on the base, a rotary motor support base arranged on the straight motor, a rotary motor arranged in the rotary motor support base, a V-range motor support base connected with the rotary motor and a V-range motor arranged on the V-range motor support base; the V-range motor is connected with a cantilever rotating shaft by a small gear and a big gear; cantilevers are arranged on the cantilever rotating shaft; a linear guide track, a rolling ball screw rod, a cantilever motor, a screw rod nut and a handle are arranged on the cantilever arranged at one side of the cantilever rotating shaft, and a balance weight is arranged on the cantilever arranged at the other side of the cantilever rotating shaft. The rehabilitation robot is mainly characterized in that the rehabilitation robot can respectively carry out the single-joint motion training of the shoulder joint and the elbow joint and can also carry out the dual-joint complex motion training; the motion training space of the shoulder joint is increased, the number of the training freedom degree is increased, the control algorithm is simple, the force feedback leads the motion to be more accurate and reliable, and the rehabilitation robot can simultaneously provide the detection for the end mechanical information.
Description
Three-degree-of-freedom shoulder and elbow joint force feedback rehabilitation robot (1) Technical field The invention relates to a robot, in particular to a robot for assisting shoulder and elbow joints of hemiplegia patients in rehabilitation training. (2) Background technology According to relevant data, the annual incidence rate of cerebrovascular patients in my country is 200 per 100,000 people, and the annual new cases are more than 1.5 million, causing economic losses to the country of more than 10 billion per year. It goes without saying that hemiplegia brings a heavy economic burden to the society and family, and seriously affects the quality of life of patients. The process of neurorehabilitation treatment is a hard work, mainly relying on rehabilitation physicians to perform one-on-one manual operations on patients. Robotics has strong advantages in labor saving, precise control of movement, recording of relevant parameters, and providing different training st...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Applications(China)
IPC IPC(8): A61H1/00B25J11/00
Inventor 张秀峰季林红李金汝长海
Owner HARBIN ENG UNIV
Features
- R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com