Apparatus and method for flexible pick of orange picking robot
A technology for picking robots and citrus, which is applied to picking machines, agricultural machinery and tools, and manipulators. It can solve the problems of easy damage to fruits and fruit trees, regardless of fruit maturity, and achieve the effect of ensuring positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
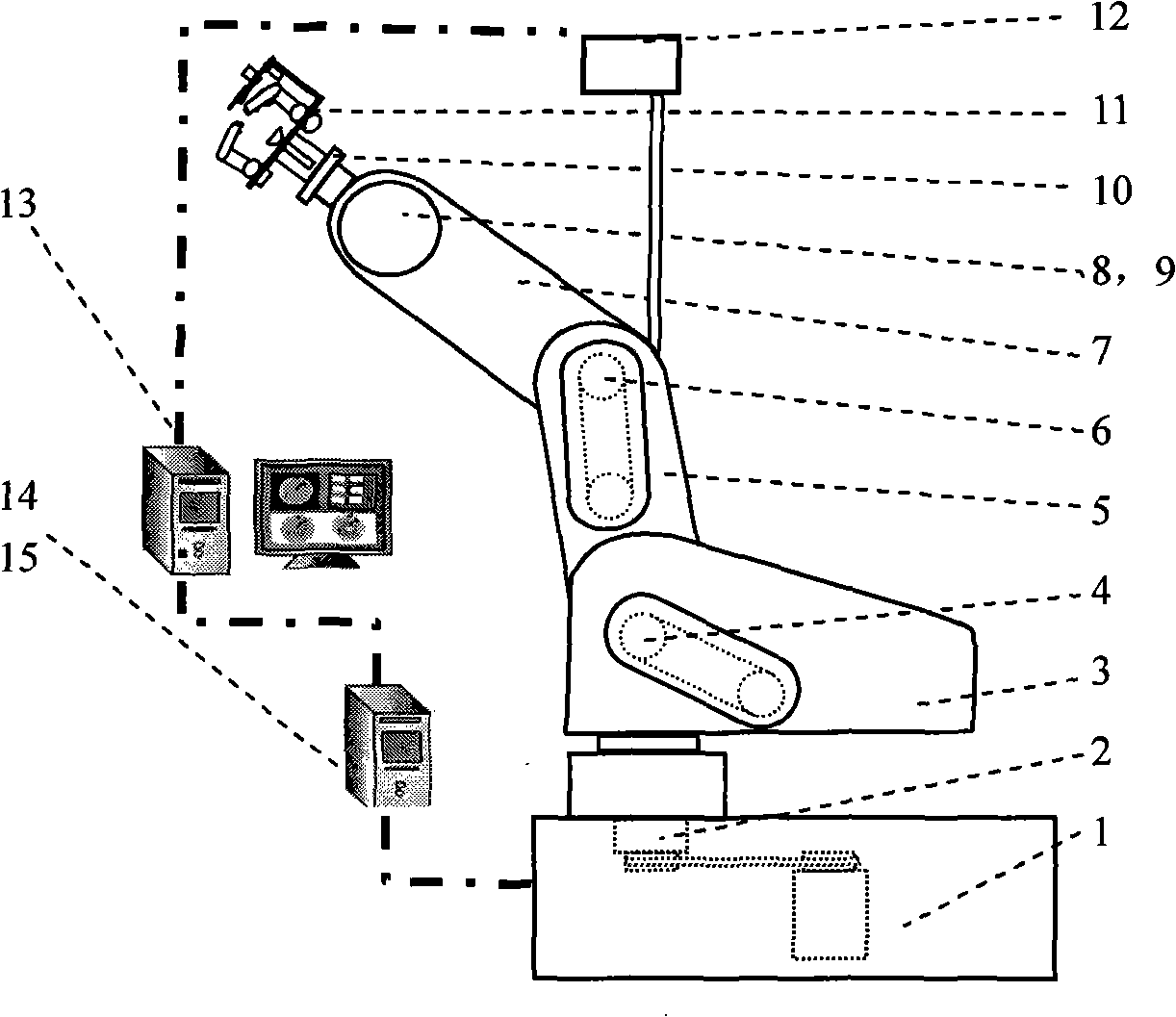
[0036] The flexible citrus picking method and device of the present invention have universal applicability in picking spherical fruits. The three-finger two-joint structure can securely grasp spherical fruits, and the force feedback system on the inside of the fingers can implement different gripping forces according to needs, which is suitable for picking thin-skinned and fragile fruits. The key difficulty of the present invention is that citrus has a hard fruit stem, and a sharp knife saw must be used to realize the separation of fruit and tree, and it is difficult to cut off once with a general blade. If you pick other fruits with easy-to-break fruit stems, such as tomatoes, you can remove the knife and saw.
[0037] According to the different growth conditions and sizes of citrus fruits, the maximum opening diameter of the designed claws of the present invention is 9 cm, which can accommodate most citrus fruits. Due to gravity, the citrus generally hangs from the branches...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com