Method for driving and controlling universal rotary magnetic field of the medical treatment miniature robot in the body
A technology of micro-robot and rotating magnetic field, which is applied in motor generator control, AC motor control, electronic commutation motor control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0053] Implementation steps of the present invention are as follows:
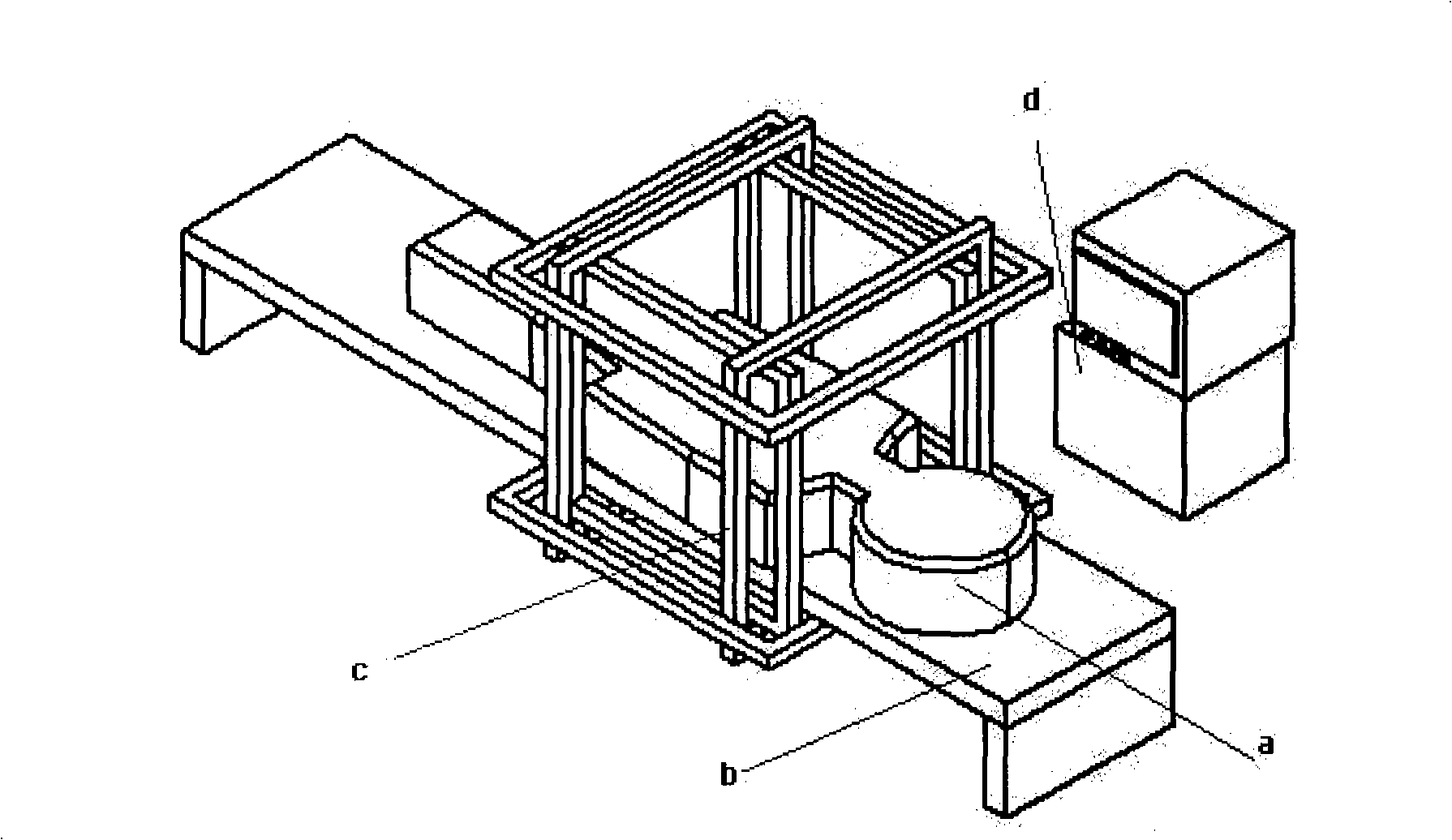
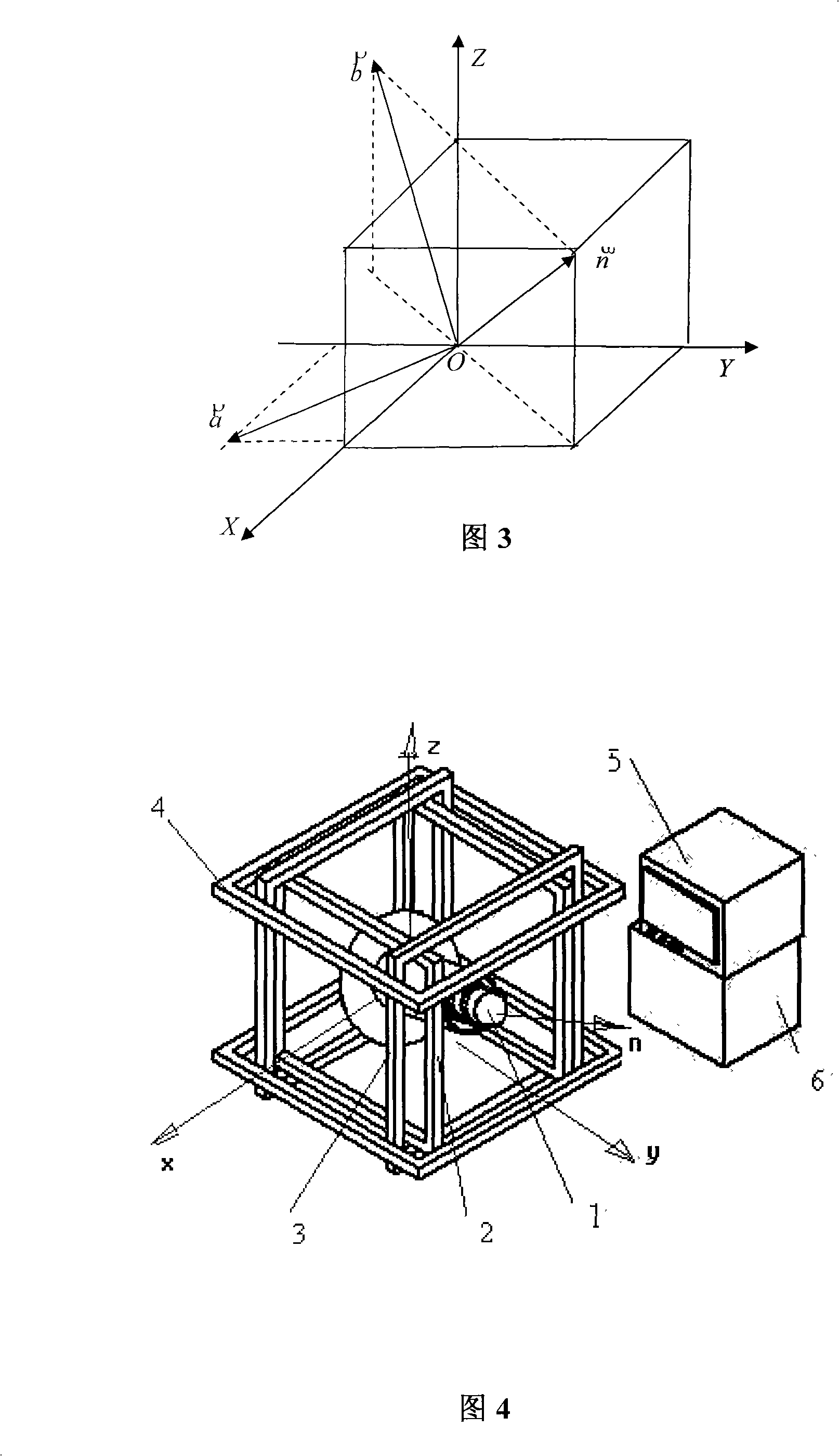
[0054] (1) Plan the space enclosed by the three-axis orthogonally nested Helmholtz coil group so as to contain the human body and the hospital bed; adopt the Helmholtz coil group 4 whose axial direction is the z-axis, and the Helmholtz coil group 4 whose axial direction is the y-axis The Holtz coil group 3 and the Helmholtz coil group 2 whose axial direction is the x-axis are mutually orthogonally nested in order from large to small.
[0055] (2) On the basis of the above sequential nesting installation scheme, complete the Helmholtz coil group 4 whose axial direction is the z-axis, the Helmholtz coil group 3 whose axial direction is the y-axis, and the Helmholtz coil group 3 whose axial direction is the x-axis. The matching design of the Helmholtz coil group 2 makes the combined inductance of the three groups of Helmholtz coils equal when driven by the same harmonic current and the amplitude of the magneti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com