Transition under-driven robot finger device
A robotic finger and underactuated technology, applied in the field of humanoid robots, can solve the problems of unreliable grasping performance, decoupling effect, and affect the appearance, and achieve the effect of light weight, reliable performance, and easy installation and maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
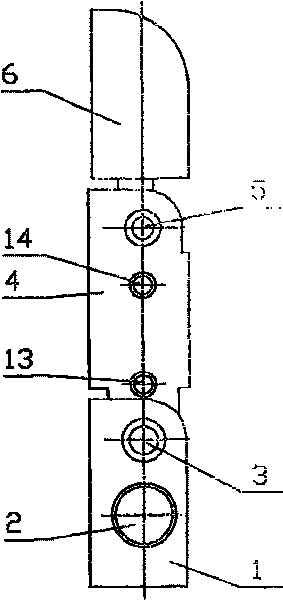
[0028] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0029] An embodiment of a transitional underactuated robot finger device designed by the present invention, such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 As shown, it mainly includes a base 1, a motor 2, a reducer 21, a first gear 11, a second gear 12, a proximal joint shaft 3, a middle finger section 4, a far joint shaft 5, and an end finger section 6; said motor 2 and the reducer 21 are fixedly connected with the base 1, the output shaft of the motor 2 is connected with the input shaft of the reducer 21, the output shaft of the reducer 21 is fixedly connected with the first gear 11, and the first gear 11 and the second gear 12 The second gear 12 is fixedly connected to the proximal joint shaft 3, the said proximal joint shaft 3 is sleeved in the base 1, the said distal joi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com