Device, program, recording medium and method for robot simulation
A simulation device and robot technology, applied in the direction of program control, program control manipulator, instrument, etc., can solve the problem that effective simulation technology has not been developed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0029] Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. In the drawings, the same or similar constituent elements are denoted by common reference signs.
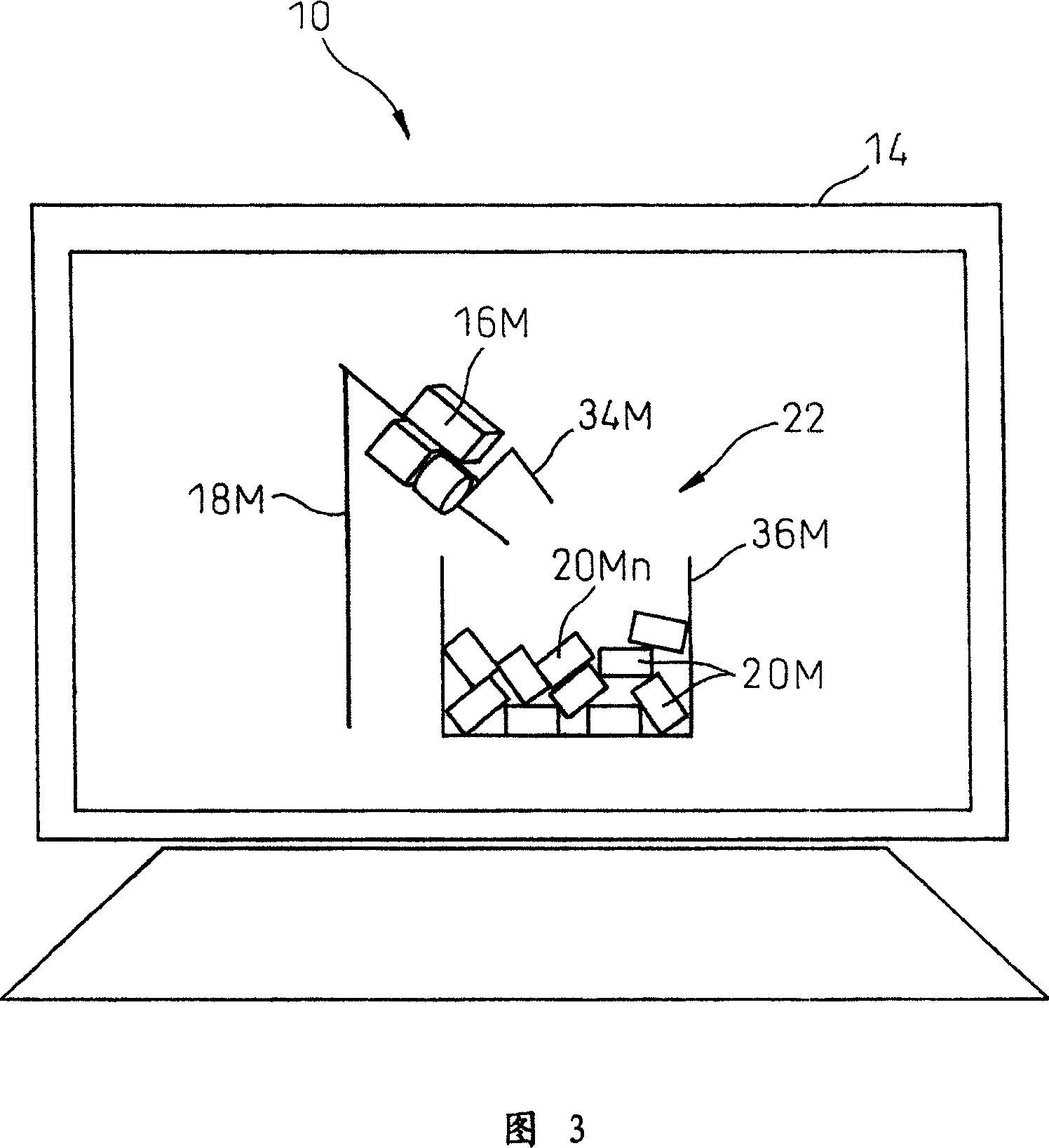
[0030] Referring to the drawings, FIG. 1 is a functional block diagram showing the basic structure of a robot simulation device 10 of the present invention, FIG. A diagram showing an example of a display screen of the display unit 14 of the robot simulator 10 . The robot simulator 10 simulates the movement of the robot 18 having the vision sensor 16 in an off-line state. The robot simulator 10 can be configured by installing necessary software on a computer such as a personal computer (PC), for example. In addition, the robot simulation device 10 itself can also be regarded as an offline teaching (or offline programming) device.
[0031] The robot simulation device 10 includes a work environment model setting unit 24 and a motion simulation unit 26 . The working...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com