Motion controller for modular embedded polypod robot
A robot motion and controller technology, applied in the field of robots, can solve problems such as inability to achieve embedded control, restrictions on robot change or expansion, and robot system paralysis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] A modular embedded robot controller proposed by the present invention will be further described in detail below in conjunction with the accompanying drawings and examples.
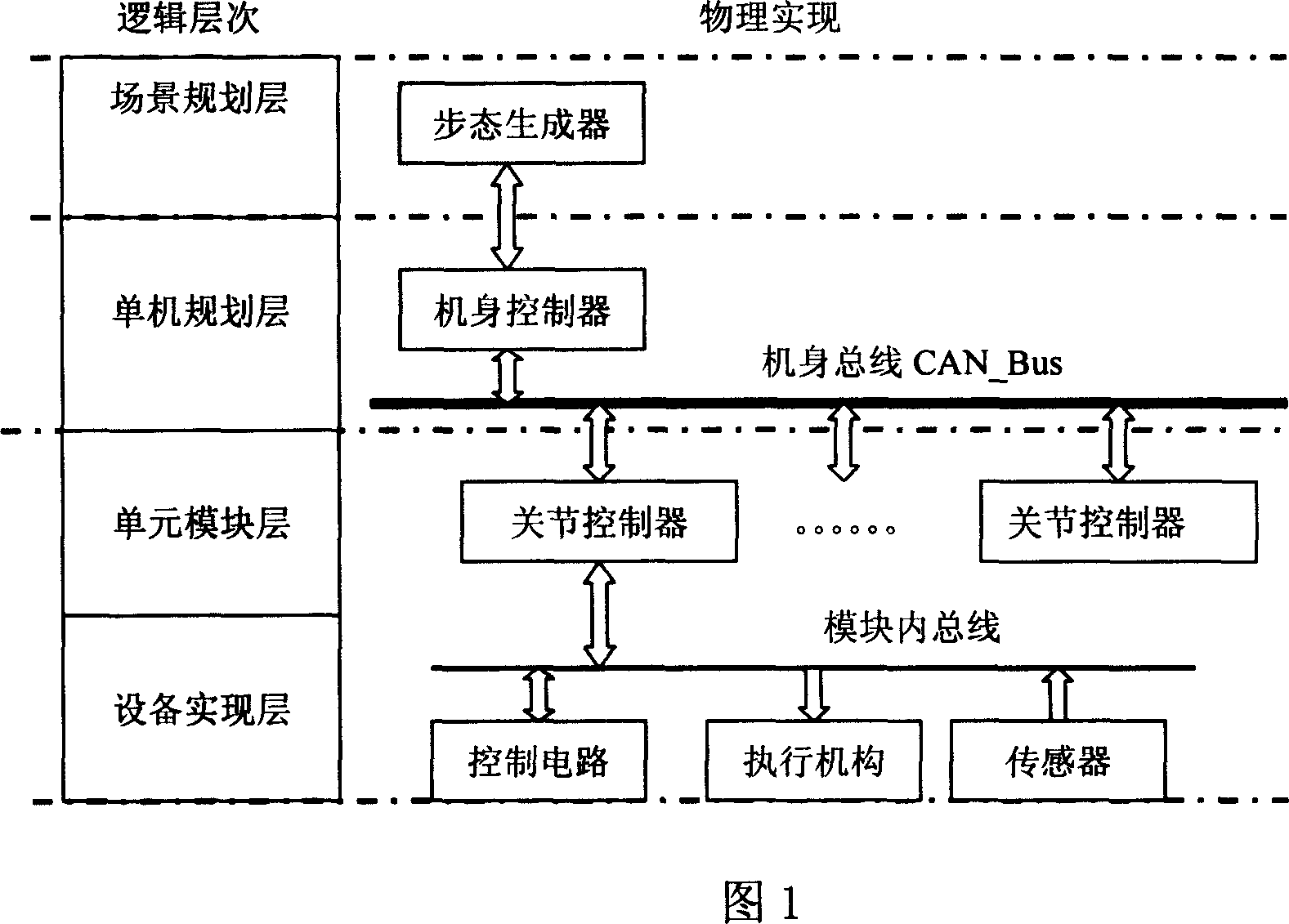
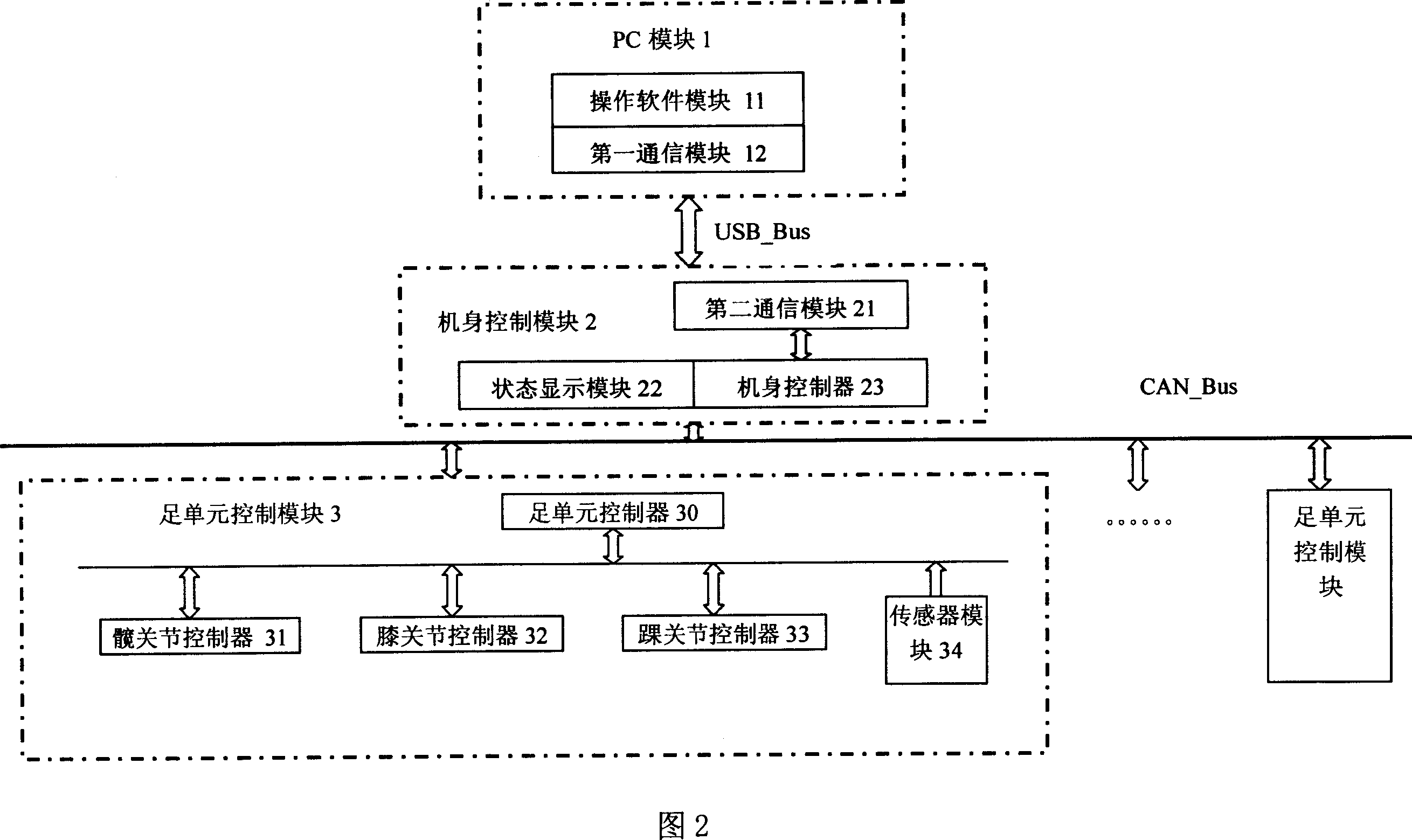
[0024] The modular embedded robot in the present invention can realize walking motion similar to ordinary walking robots, and can provide expanded functions for the robot by adding new modules to the robot platform. Therefore, the controller needs to realize two functions: (1) control the robot to complete basic actions such as walking and turning; Plug and play" function. In order to realize modular functions, it is necessary to realize: (1) Divide the control system into different logical levels, (2) Implement a class of functions in each logical layer, (3) Use standard interfaces between logical layers interact.
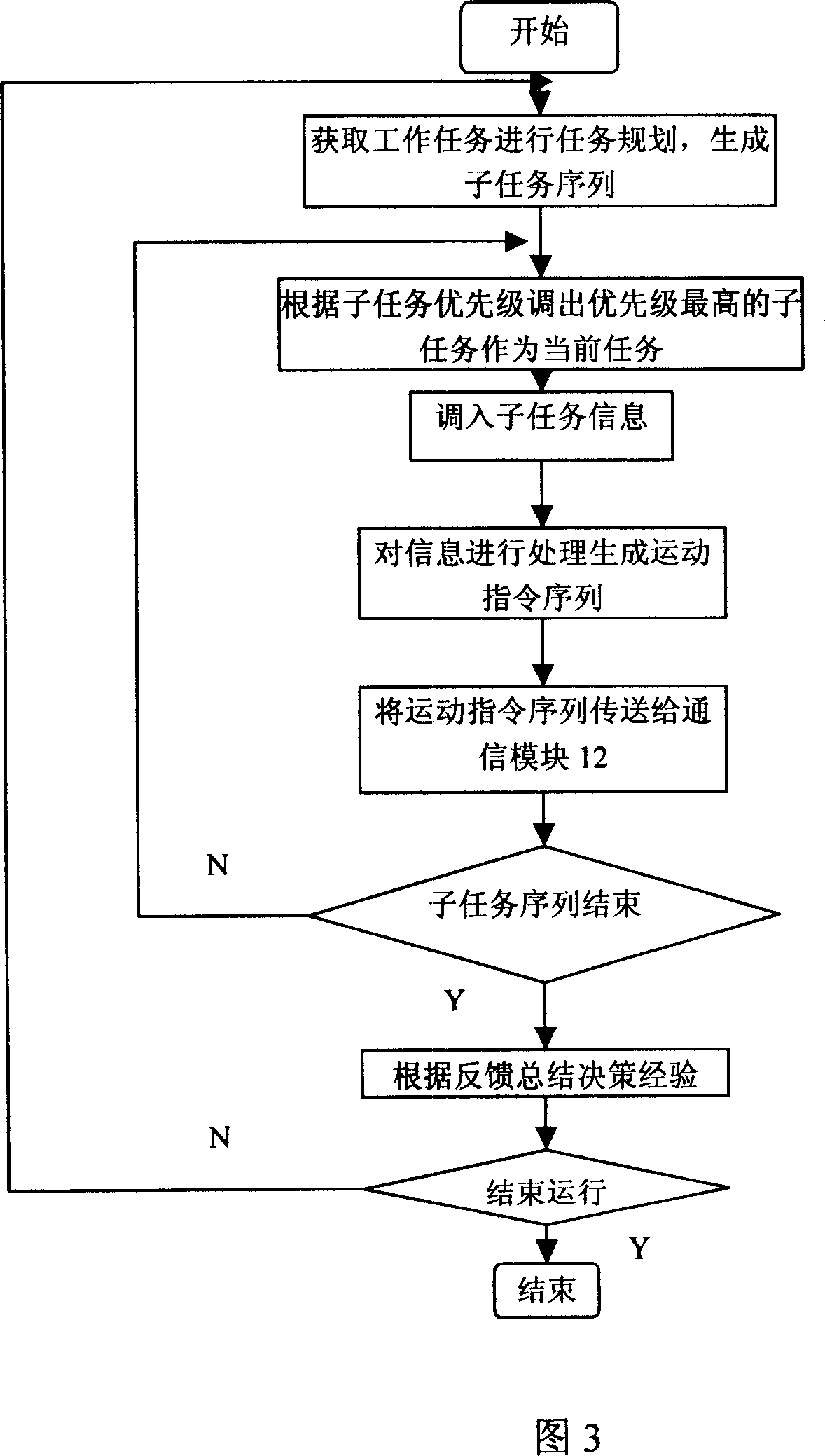
[0025] After realizing the control system with modular characteristics, by analyzing the robot's motion control strategy, the robot's motion control can be subdivided and divided into...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com