Microtrauma operation cavity creating manipulator with four freedoms
A minimally invasive surgery and manipulator technology, applied in the field of manipulators, can solve problems such as automatic adjustment of robots without minimally invasive surgery, and achieve the effect of flexible automatic adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings.
[0021] Such as figure 1 , 2, 3, 4, 5, 6, 7, 8,
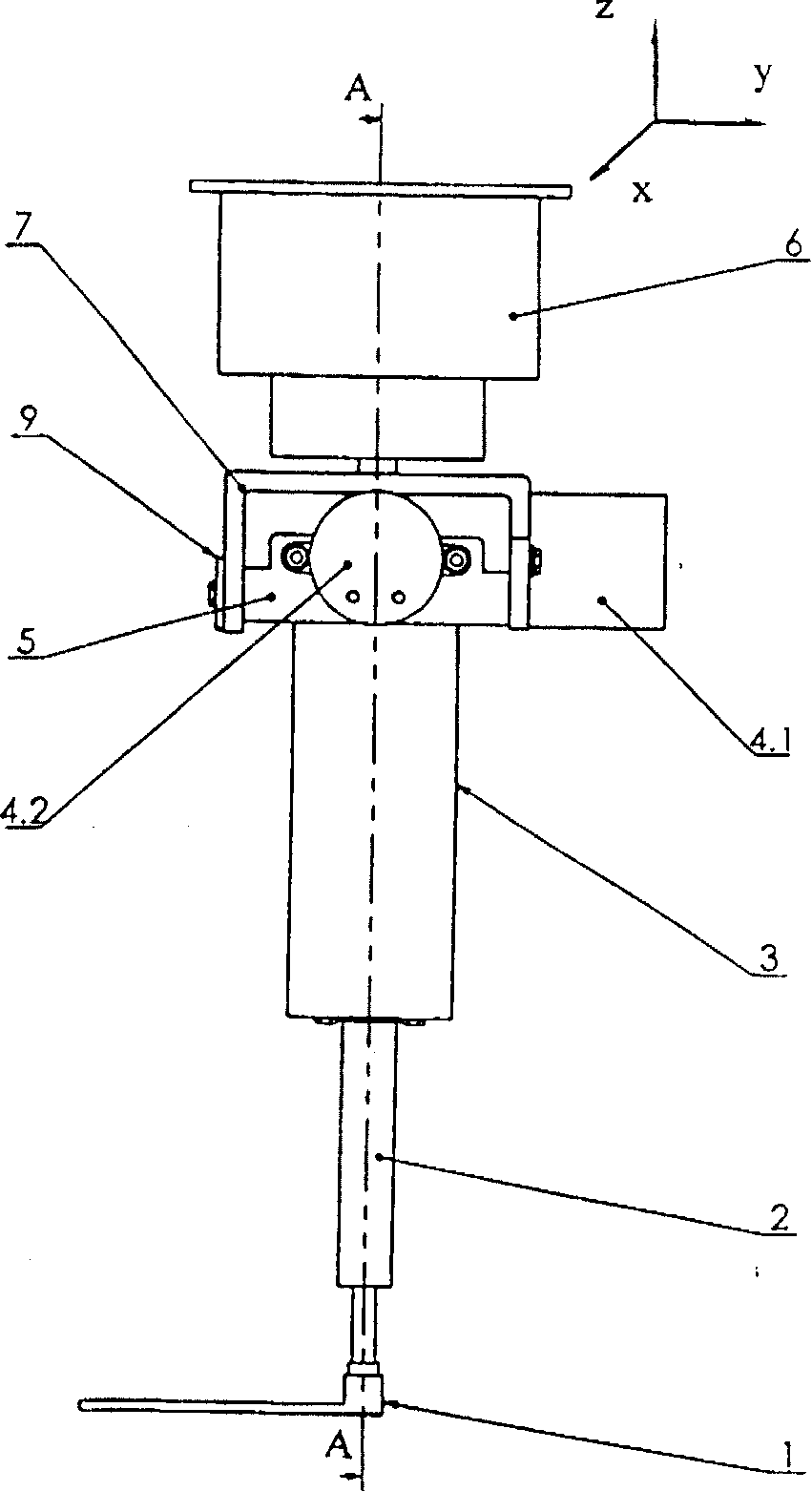
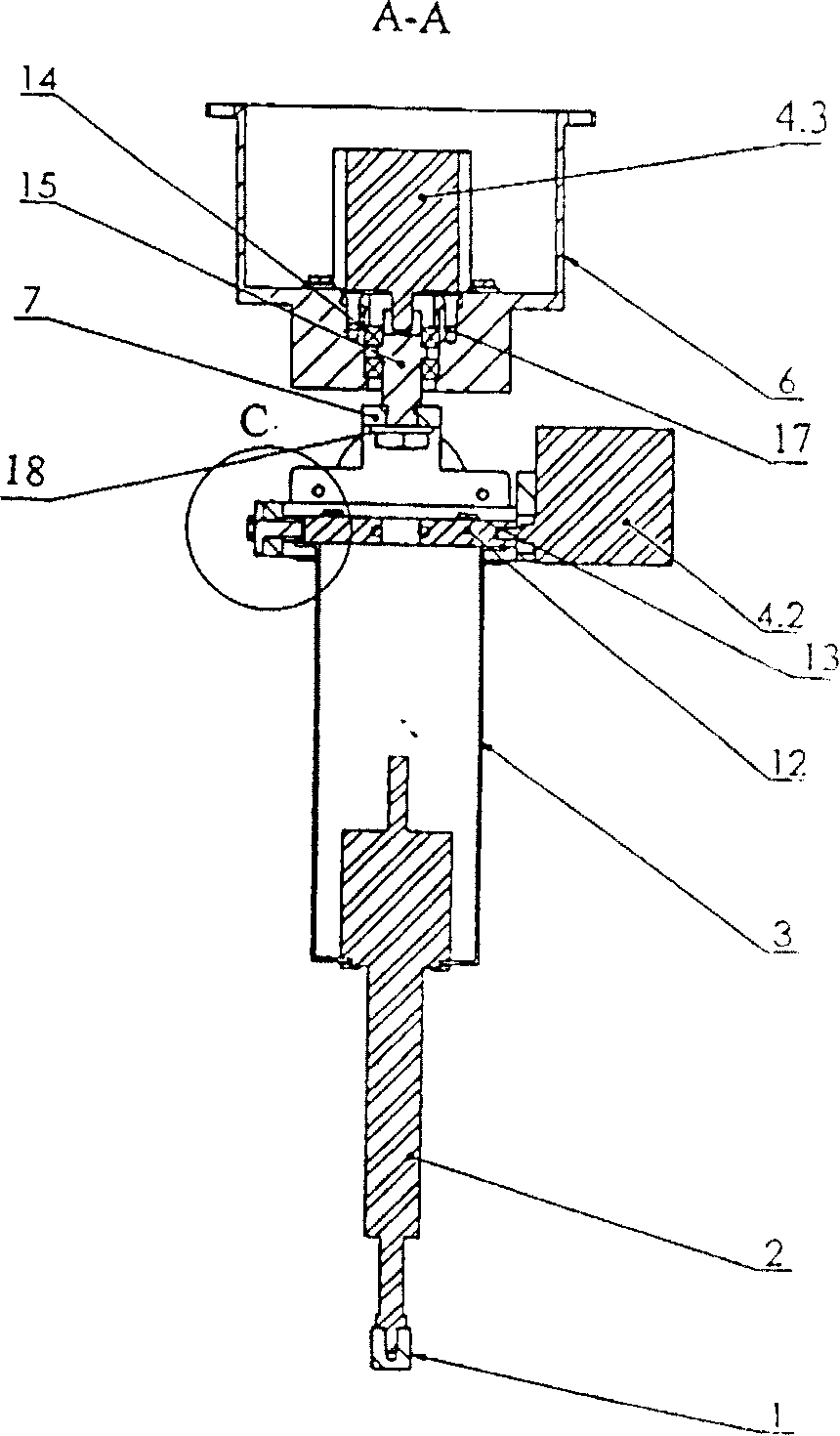
[0022] 1) Put the linear stepping motor 2 into the hanging bucket 3 from the upper end of the hanging bucket 3, connect the linear stepping motor 2 exposed at one end of the hanging bucket 3 to the lower hook 1, and move the linear stepping motor 2 along the Z axis;
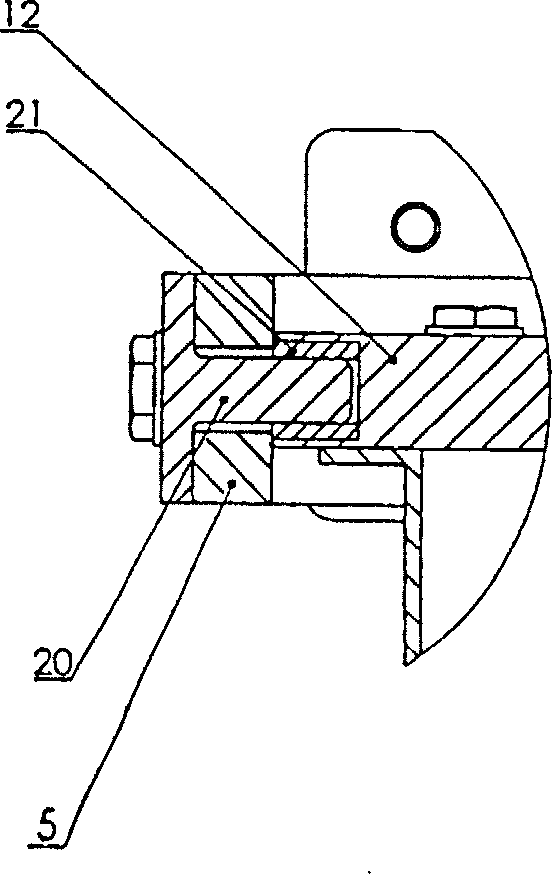
[0023] 2) The flange at the upper end of the hanging bucket 3 is connected to the middle plate 12, and a round hole is opened on one side of the middle plate 12, the first copper ring 21 is put into the round hole, the middle plate 12 is inserted into the middle frame 5, and the first copper ring 21 is inserted into the middle frame 5. A patch 20 is fixed on the side of the middle frame 5, the shaft on the first patch 20 is in clearance fit with the first copper ring 21 installed in the middle plate 12, and the second deceleration stepping motor 4.2 is fix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com