Automated robotic measuring system
a robotic measuring system and robotic arm technology, applied in the direction of speed/acceleration/shock measurement devices, measurement devices, measurement devices, etc., can solve the problems of affecting the accuracy of coordinate acquisition, so as to improve the tolerance to external physical perturbations and improve the effect of vibration and temperature damping characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030]The following detailed description presents various descriptions of certain embodiments of the present teachings described herein. However, the inventive scope of the present teachings can be embodied in a multiplicity of different ways as defined and covered by the claims. In this description, reference is made to the drawings wherein like parts are designated with like numerals throughout.
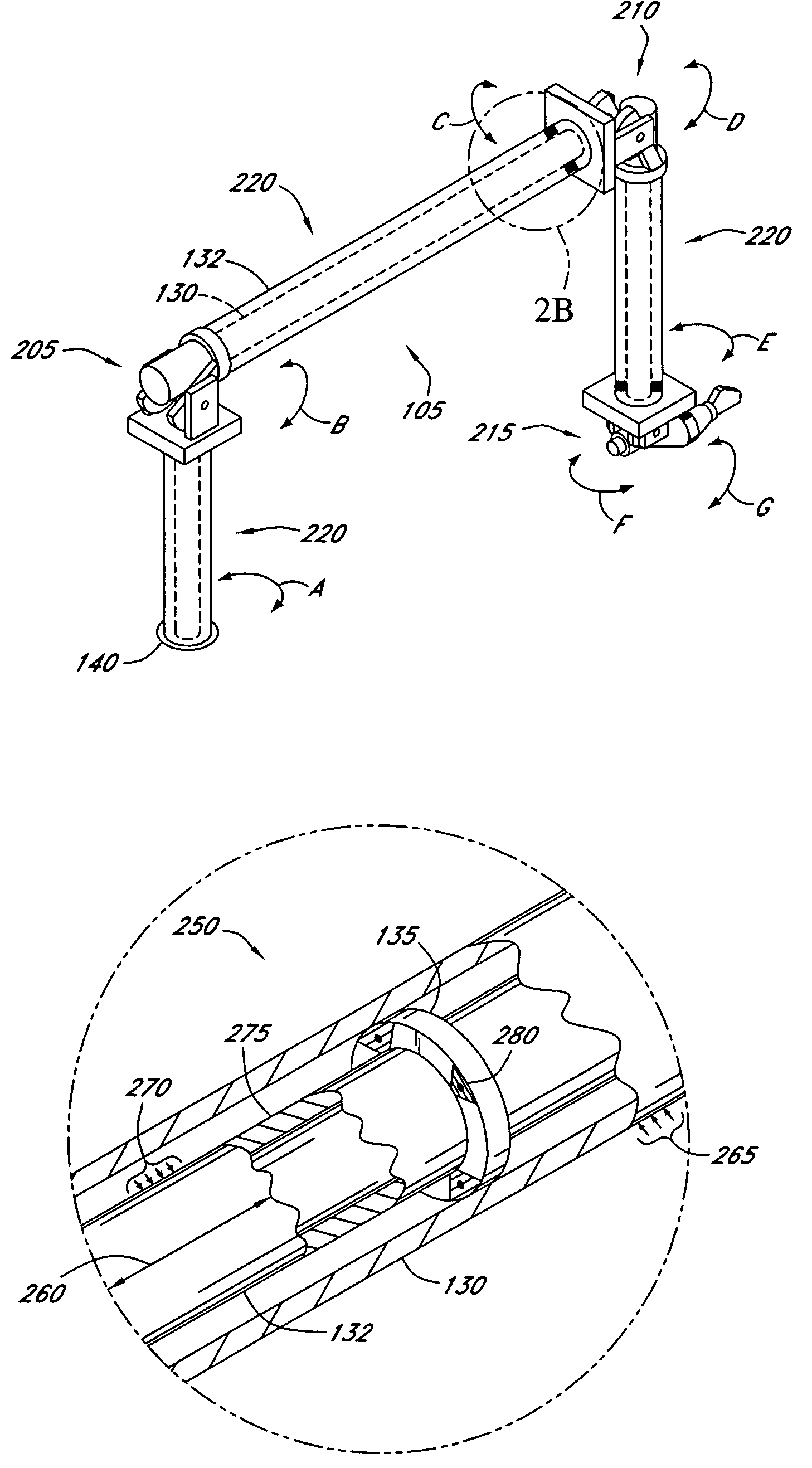
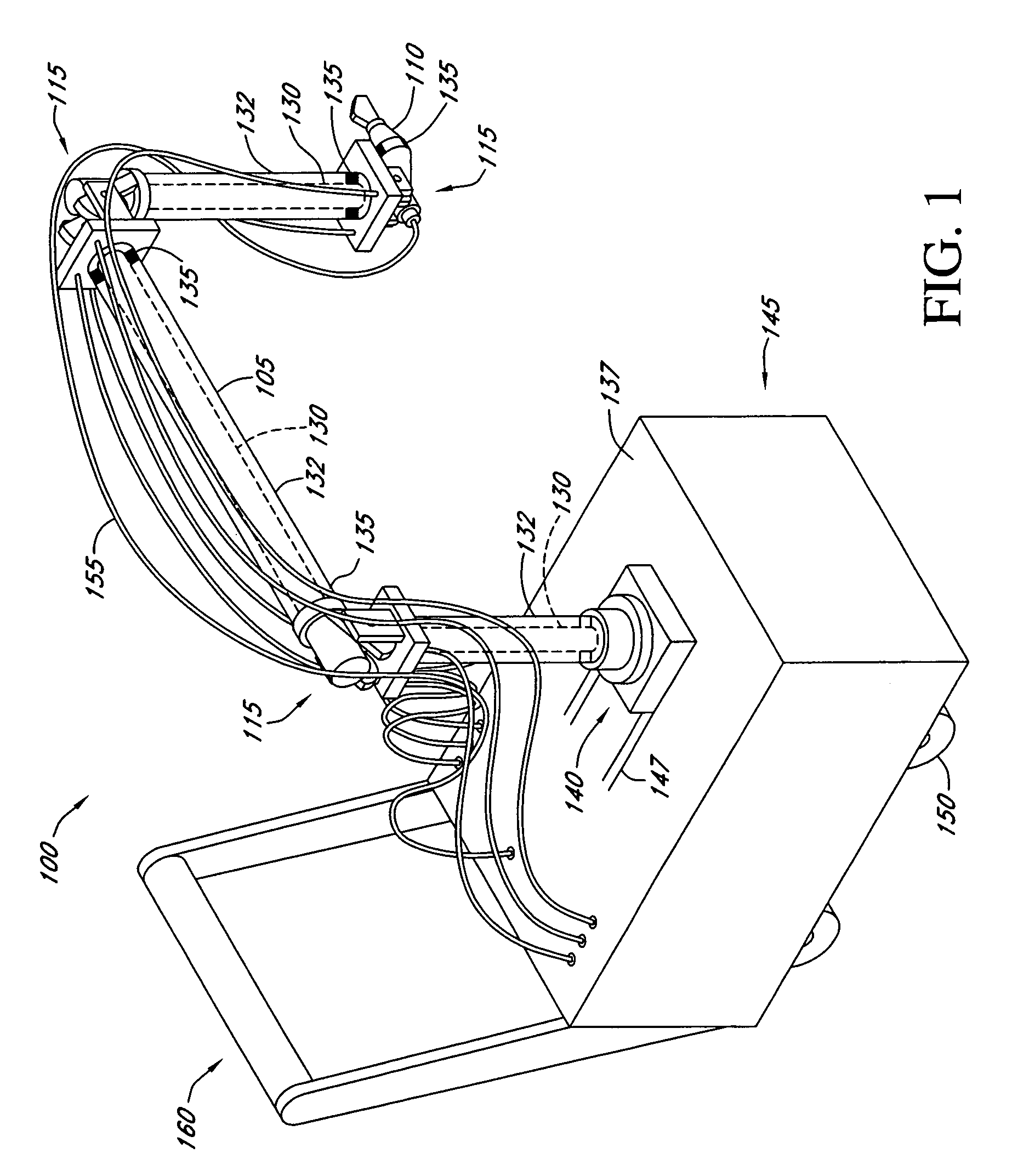
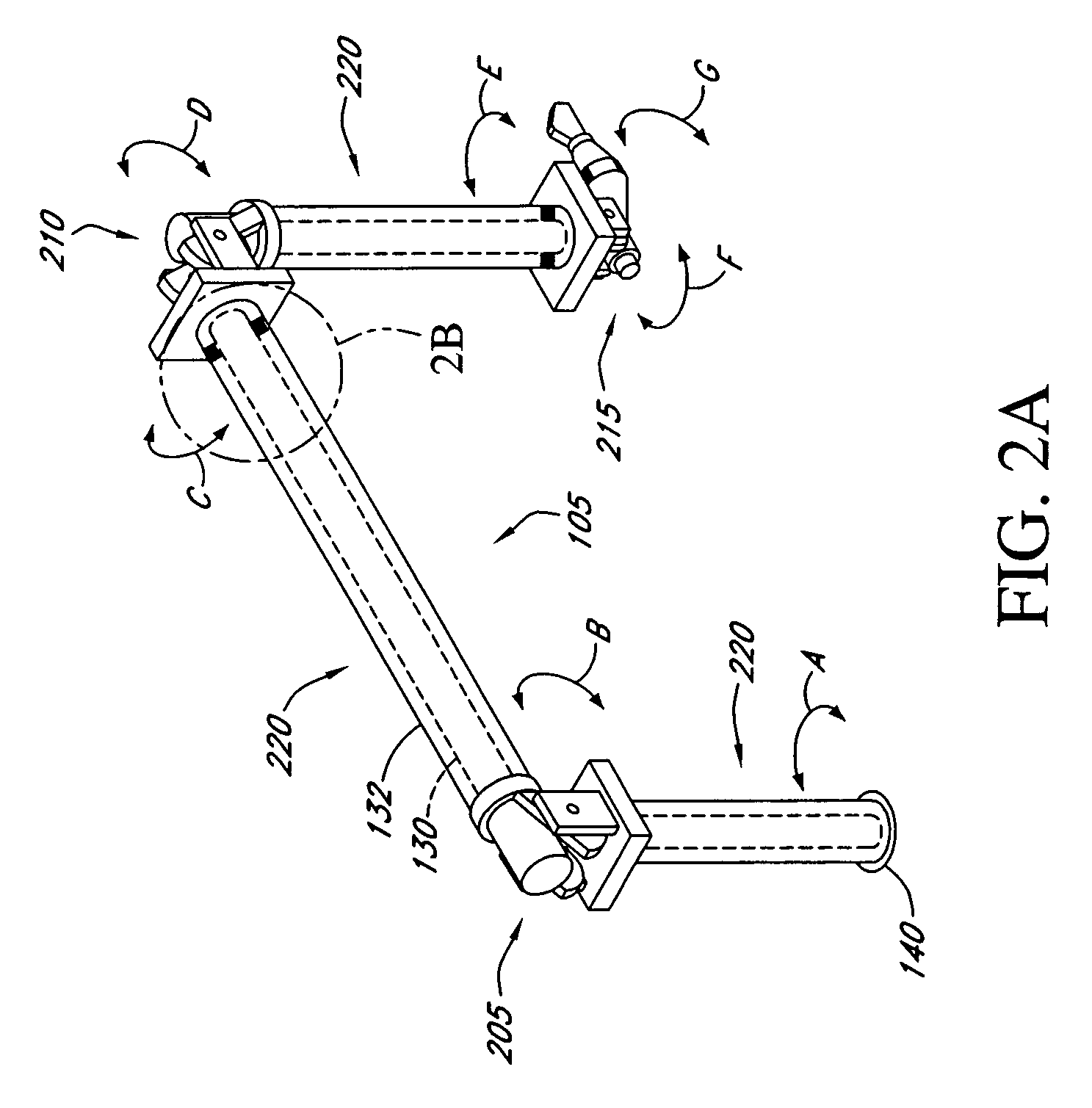
[0031]While various embodiments of the present teachings are directed towards an automated robotic measuring system or a motor-assisted coordinate measuring machine; one skilled in the technology will appreciate that the systems and methods described herein may be adapted for use with other types of CMMs and PCMMs. For example, the vibration damping and thermal compensation features may be adapted for use with conventional designs to improve their resistance to external perturbations. Similarly, the motor-assisted control and movement characteristics of the present teachings may be adapted ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com