Angular position and velocity estimation for synchronous machines based on extended rotor flux
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
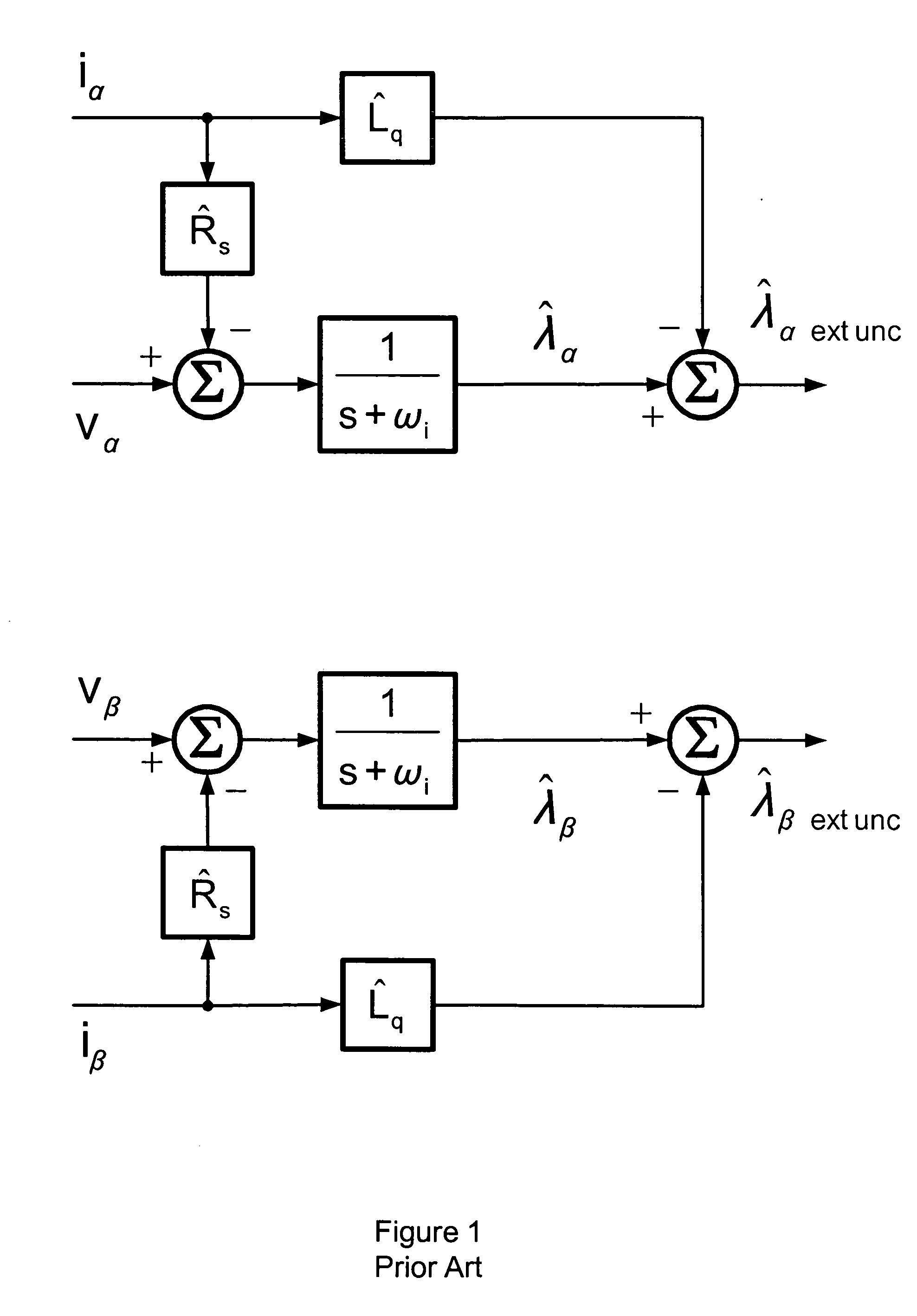
[0012] For Extended Flux Sensorless (EFS) control of a synchronous dynamoelectric machine, the following differential equations estimate the stator flux linkages in the α-β two-axis stationary reference frame using a lag approximation to a pure integrator: ⅆλ^αⅆt=vα-R^s×iα-ωefs×λ^α(1)ⅆλ^βⅆt=vβ-R^s×iβ-ωefs×λ^β(2)
where, [0013]λα−α-axis stator flux estimate: V-sec [0014]λβ=β-axis stator flux estimate; V-sec [0015] vα=α-axis stator potential; V [0016] vβ=β-axis stator potential; V [0017] iα=α-axis stator current; A [0018] iβ=β-axis stator current; A [0019] {circumflex over (R)}s=estimated stator resistance; Ohm [0020]ωi=lag function corner frequency; sec−1
[0021] For alternating current (AC) steady state analysis, the transformation of these differential equations into Laplace transform notation is: λ^α=vα-R^s×iαs+ωi(3)λ^β=vβ-R^s×iβs+ωi(4)
where [0022] s=Laplace operator; sec−1
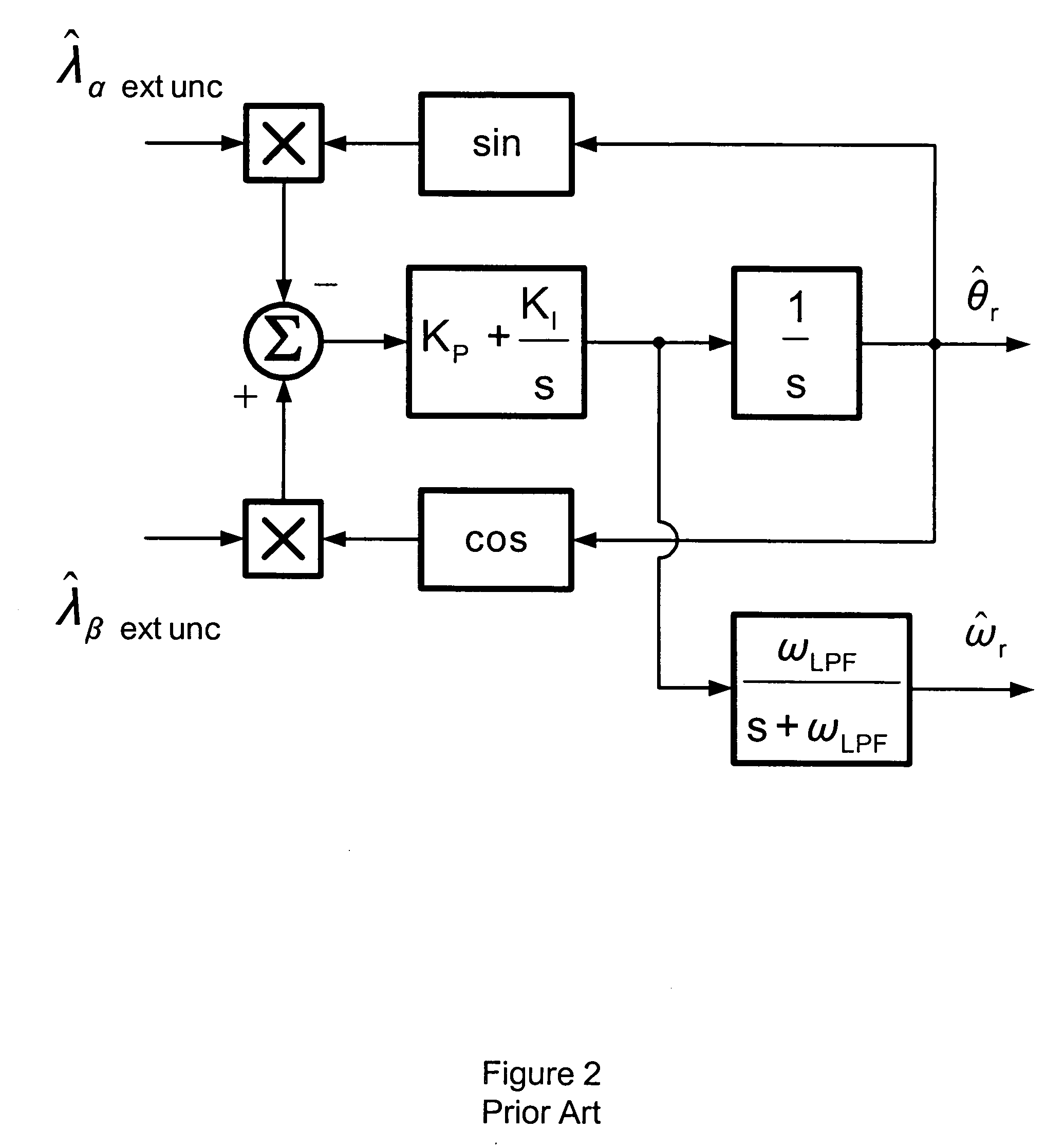
[0023] The magnitudes of these two stator flux linkage estimates at an estimated electrical frequency Of {c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com