Buoyancy and propellor dual-driving-mode long-distance autonomous underwater robot
A technology of underwater robots and propellers, applied to ships and other directions, can solve problems such as low speed, environmental interference, short voyage and battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
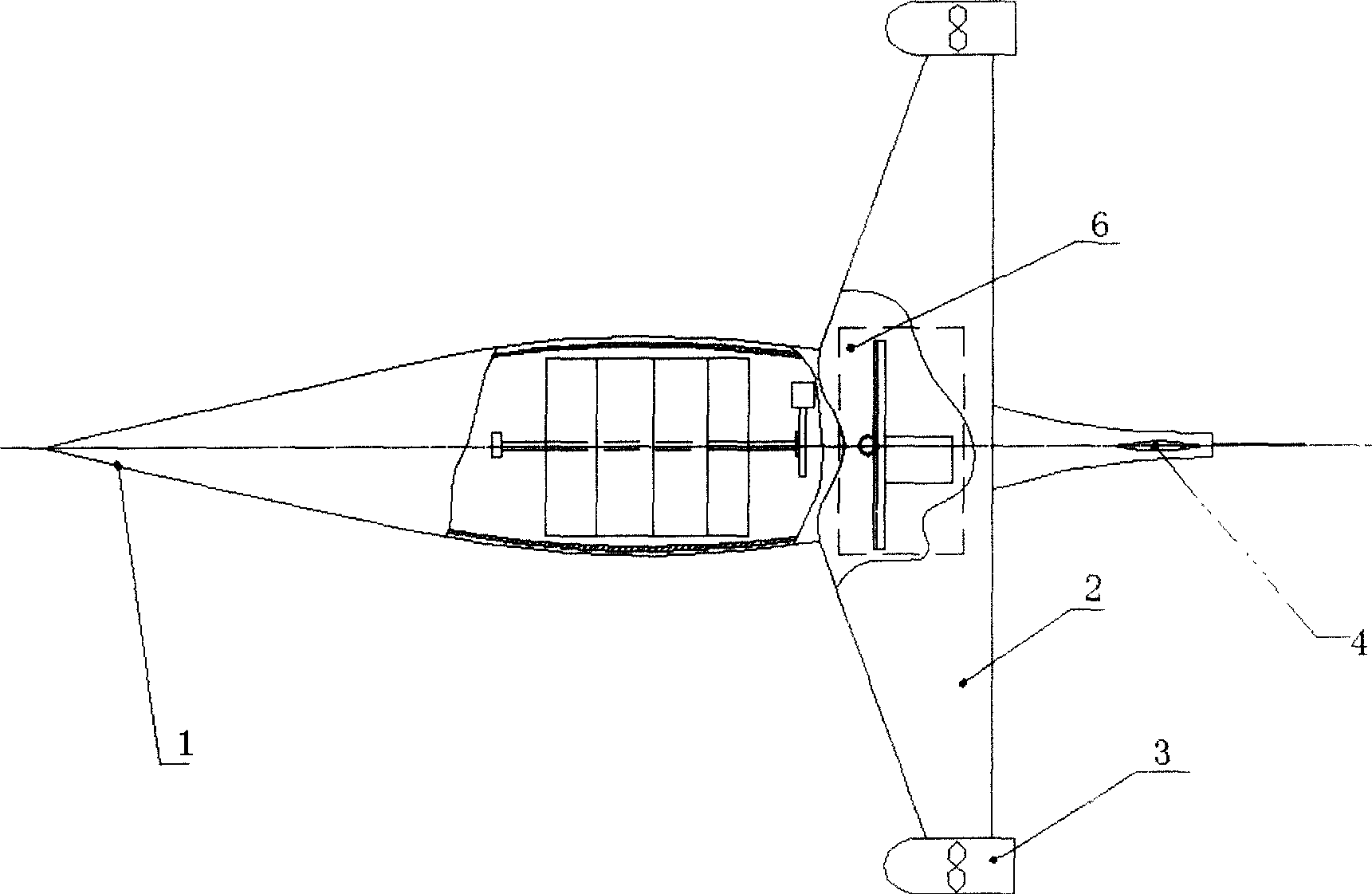
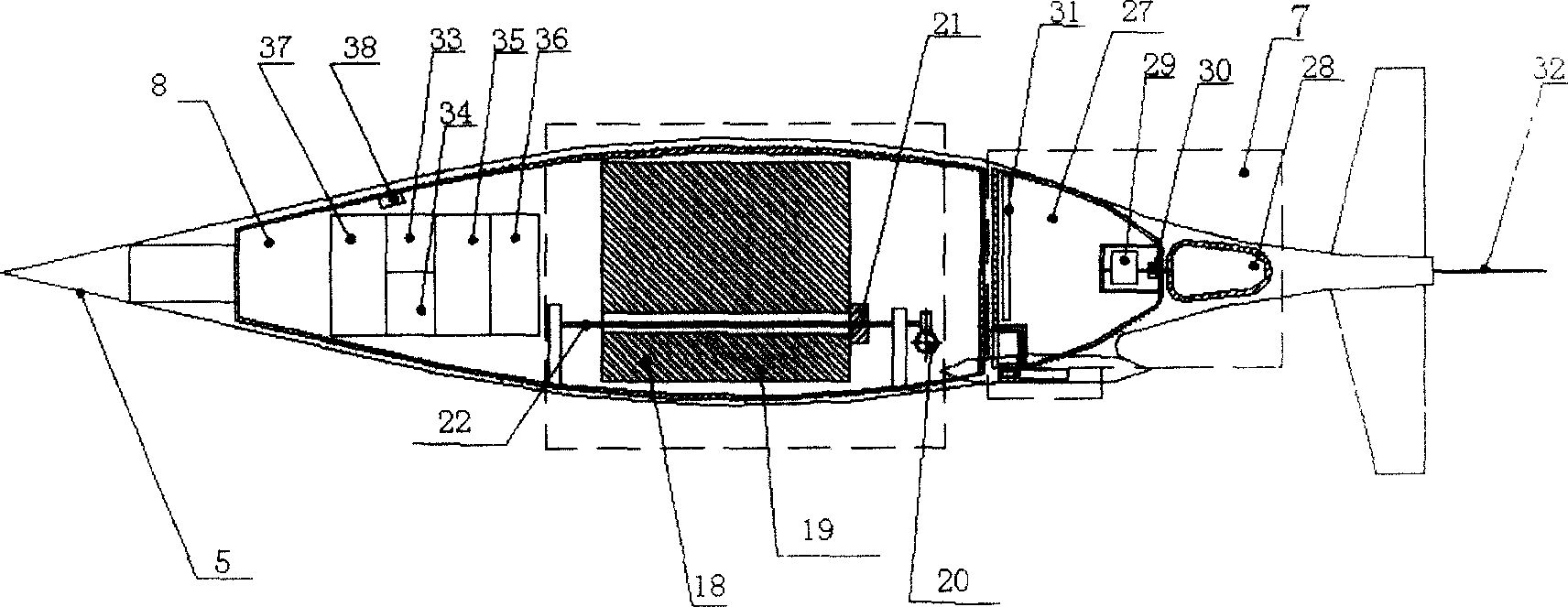
[0025] Such as Figure 1-6As shown, the present invention includes: a robot main body 1, a pair of main wings 2, a pair of propellers 3 and a pair of vertical tail fins 4, the outside of the robot main body 1 is a water-permeable shell 5 for rectification, and the inside of the water-permeable shell 5 is a lateral center of gravity adjustment Device 6, buoyancy regulating device 7 and pressure chamber 8. The water-permeable shell 5 is a revolving body with an aspect ratio between 6 and 9, and has a shape with low fluid resistance. The main wing 2 and the vertical tail 4 have low fluid resistance airfoils. The main wings 2 are arranged at the rear of the water-permeable shell 5 and symmetrically distributed on the left and right sides of the water-permeable shell 5 . The vertical fins 4 are arranged at the tail of the water-permeable shell 5, symmetrically distributed on the upper and lower sides of the water-permeable shell 5, and in the vertical symmetry plane of the water-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com