Robot system
A technology of manipulators and coordinate systems, applied in the field of manipulator systems, can solve problems such as increasing user burden, achieve the effect of reducing teaching costs and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
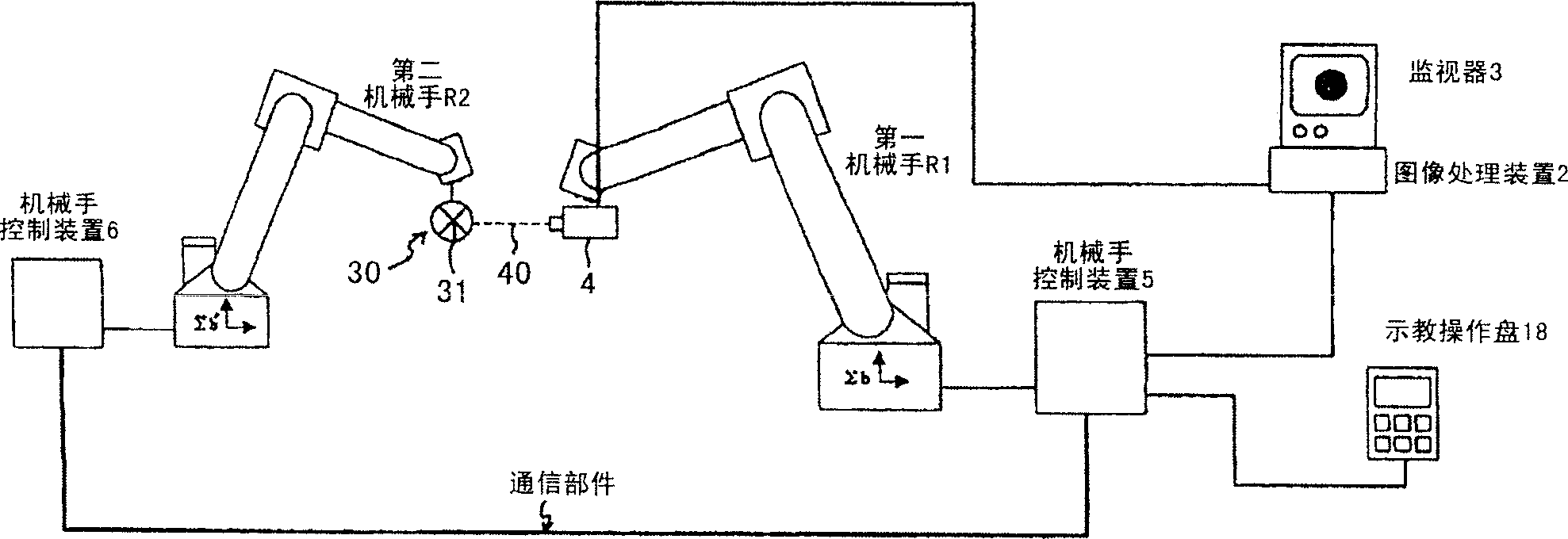
[0039] Hereinafter, embodiments of the present invention will be described sequentially with reference to the drawings. first, figure 1 It is a schematic diagram showing the overall structure in one embodiment of the present invention. In this figure, the manipulators to be calibrated are manipulator R1 and manipulator R2, which are connected to respective manipulator control devices 5 and 6 .
[0040] A camera 4 is attached to the front end of the arm of one robot arm (here, the first robot arm) R1. The camera 4 is, for example, a CCD camera, and is a known light-receiving device having a function of detecting a two-dimensional image through a light-receiving surface for imaging (CCD array surface). In addition, as will be described later, a PSD (Position Sensing Detector: Position Sensing Detector) may be used as the light receiving device. A camera 4 is connected to an image processing device 2 having a monitor 3 constituted by LCD, CRT, or the like.
[0041] The charac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com