Driving structure and driving method of mobile orbot platform
A mobile robot and drive structure technology, applied in the field of robots, can solve problems such as performance mismatch and waste of resources, and achieve the effects of good dynamic characteristics, cost reduction and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
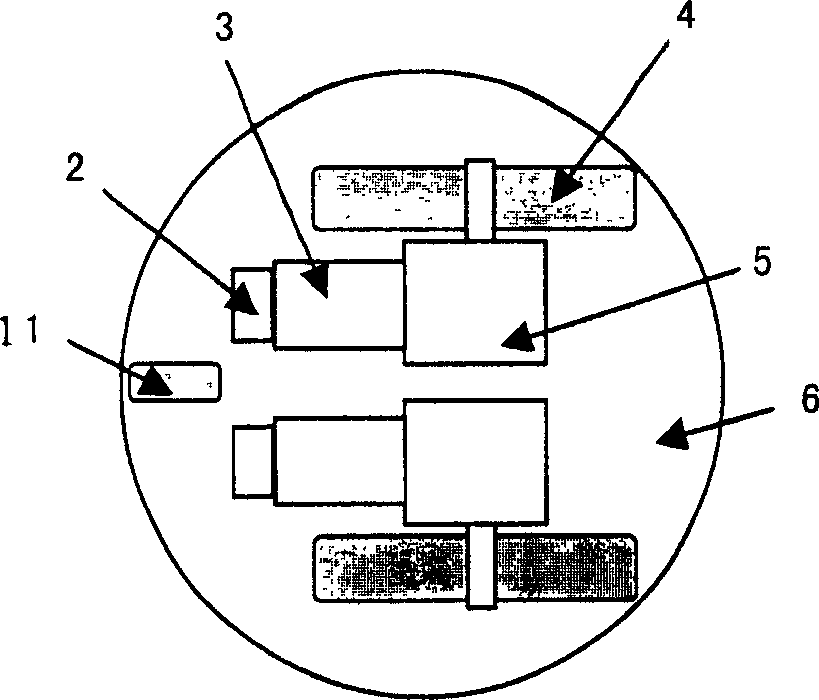
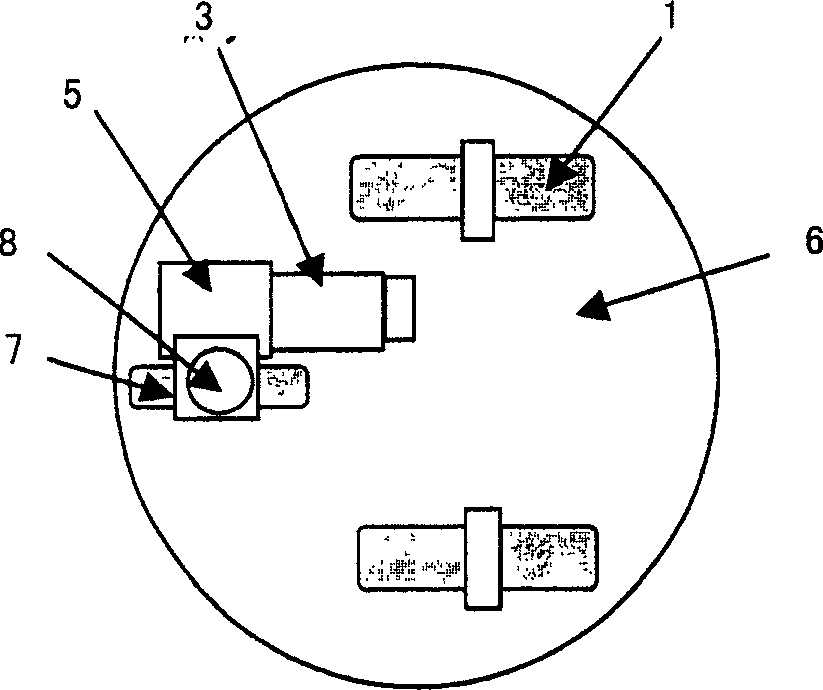
[0066] In the development of service robots, the above-mentioned three-wheel coordinated drive structure has been applied. The design requirements of the entire robot platform are: the volume is 60×50×70cm 3 ;The total weight is 30kg; the movement speed range is: 0~200cm / s; the positioning accuracy is 30cm / s 2 . Referring to the above pointers, select the guide wheel control motor DC motor 30w; the rated speed is 200rpm; the reduction ratio of the guide wheel motor reducer is 55.4:1; Photoelectric or magnetoelectric detection of the angle of the wheel disc and use the follow-up circuit to extract the wheel speed and wheel angle position (this device has applied for a national patent, patent number 02231208.0). Referring to products that are easy to obtain in the market and have relatively good performance and price, the driving wheel is driven by a 180w disc type DC motor (actually the power > 80w can meet the requirements); the magnetoelectric simple code wheel speed wheel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com