Five-coardinate space positioning robot mechanism
A spatial positioning and robotic technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low precision, patient pain, doctor fatigue, etc., and achieve the effect of high precision, small trauma, and easy operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
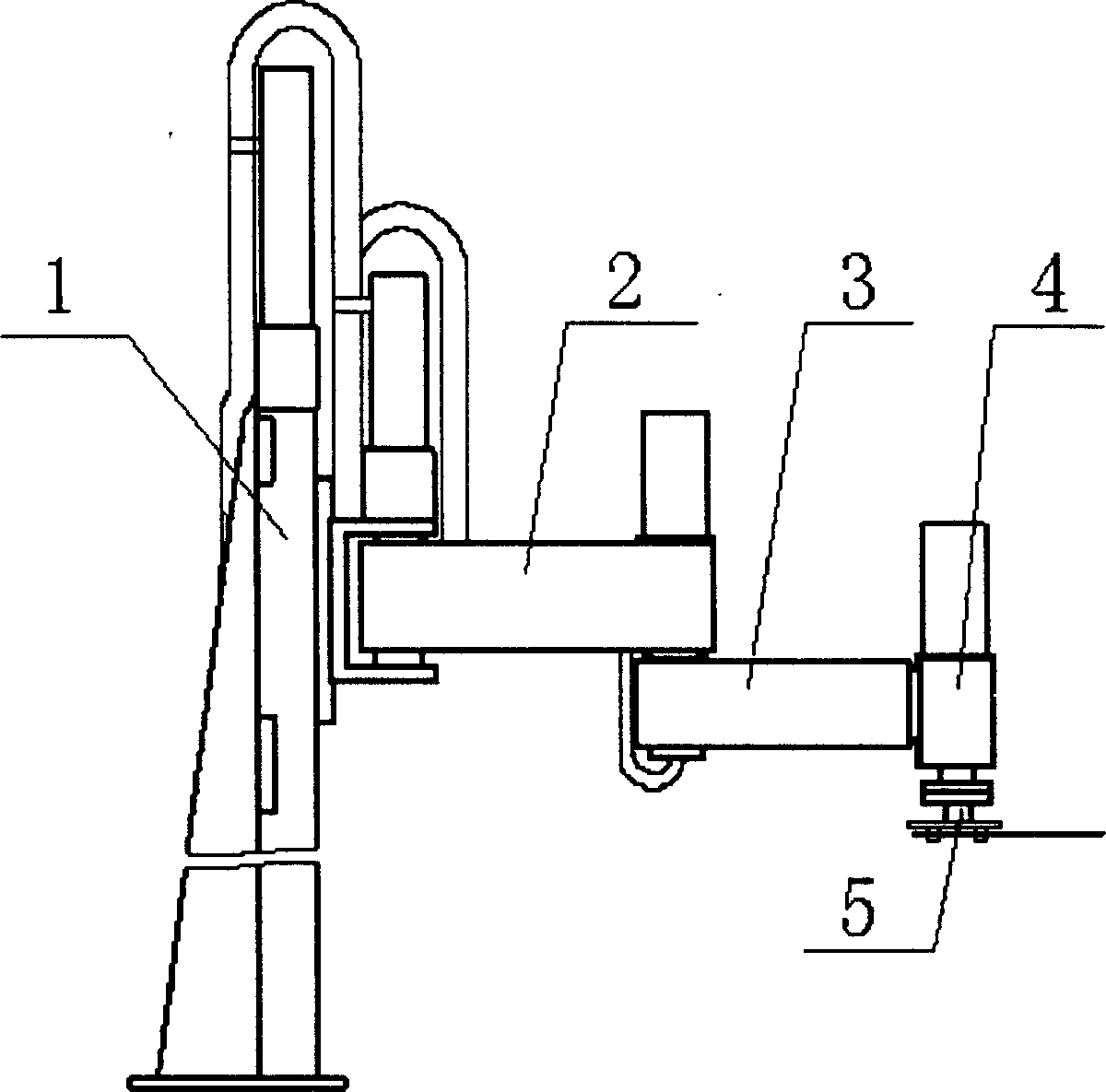
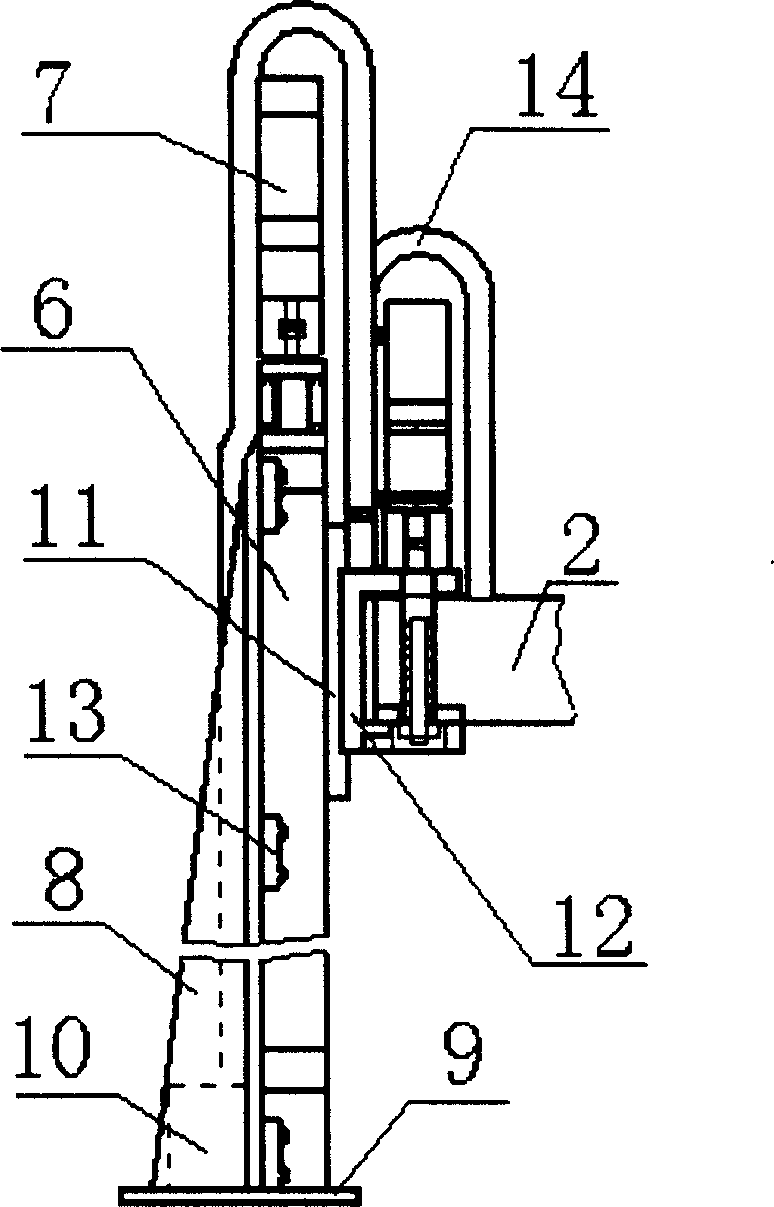
[0026] See Figure 1-8 As shown, the five-coordinate space positioning robot mechanism of the present invention is composed of lifting arm 1, big arm 2, small arm 3, wrist 4 and needle frame 5. Between the big arm 2 and the forearm 3, between the forearm 3 and the wrist 4, between the wrist 4 and the needle frame 5 are connected by a rotating shaft. Driven by the motor, each part can generate relative motion, and the working end can independently realize high-precision absolute positioning according to the planned path, and has a large working space and load capacity. The robot drive and control system is composed of an AC servo motor, a driver, a photoelectric encoder, a control card, a computer and control software.
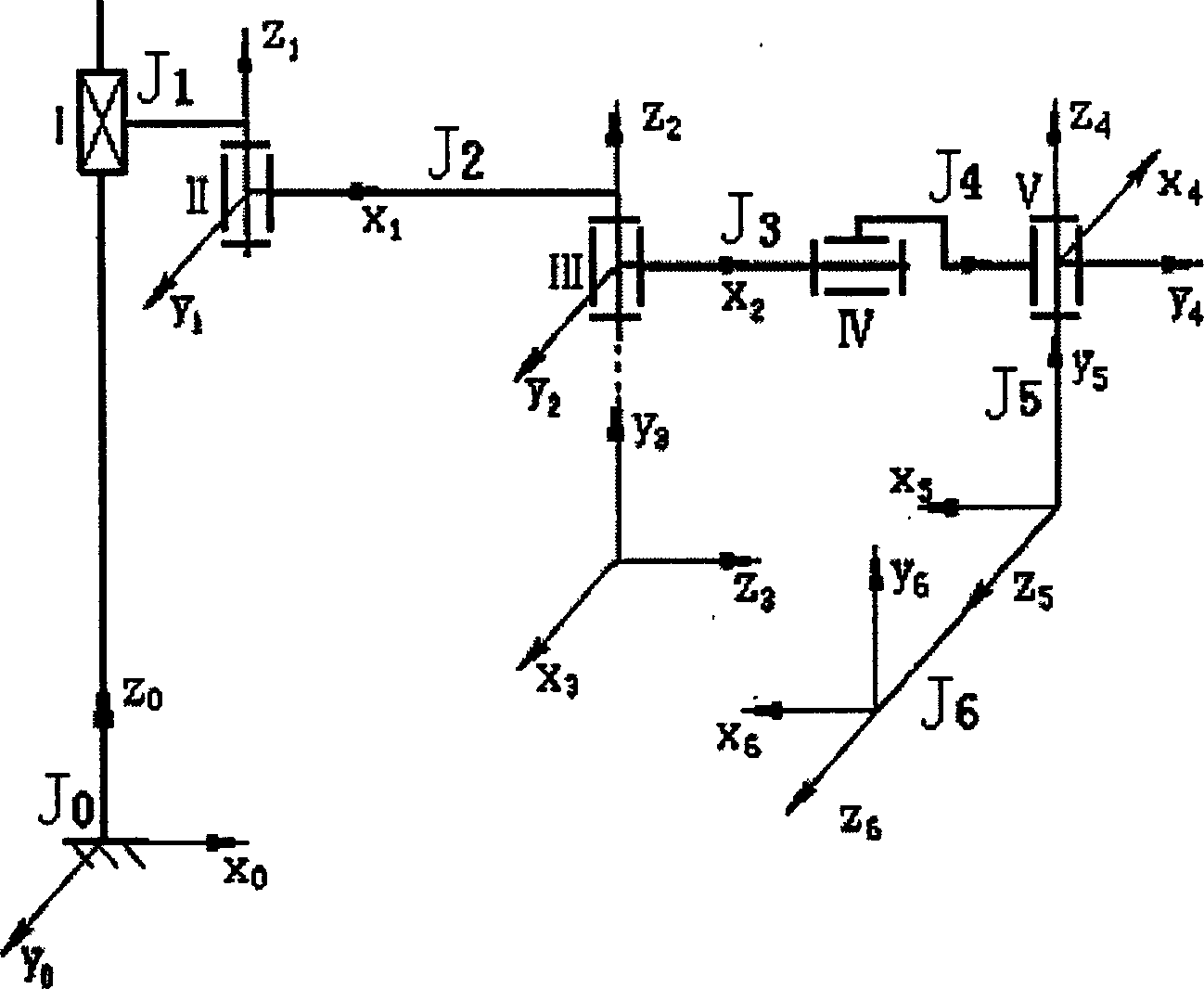
[0027] The robot kinematics structure of the present invention has five degrees of freedom, which are respectively I, II, III, IV and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com