Robot anthropomorphic multi- finger hand device
A robot and anthropomorphic technology, applied in the direction of manipulators, claw arms, chucks, etc., can solve the problems of the appearance of the human hand, the number of fingers, the number of joint degrees of freedom, and the large difference in movement flexibility, etc., and achieve light weight, easy control, and small size. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The content of the specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
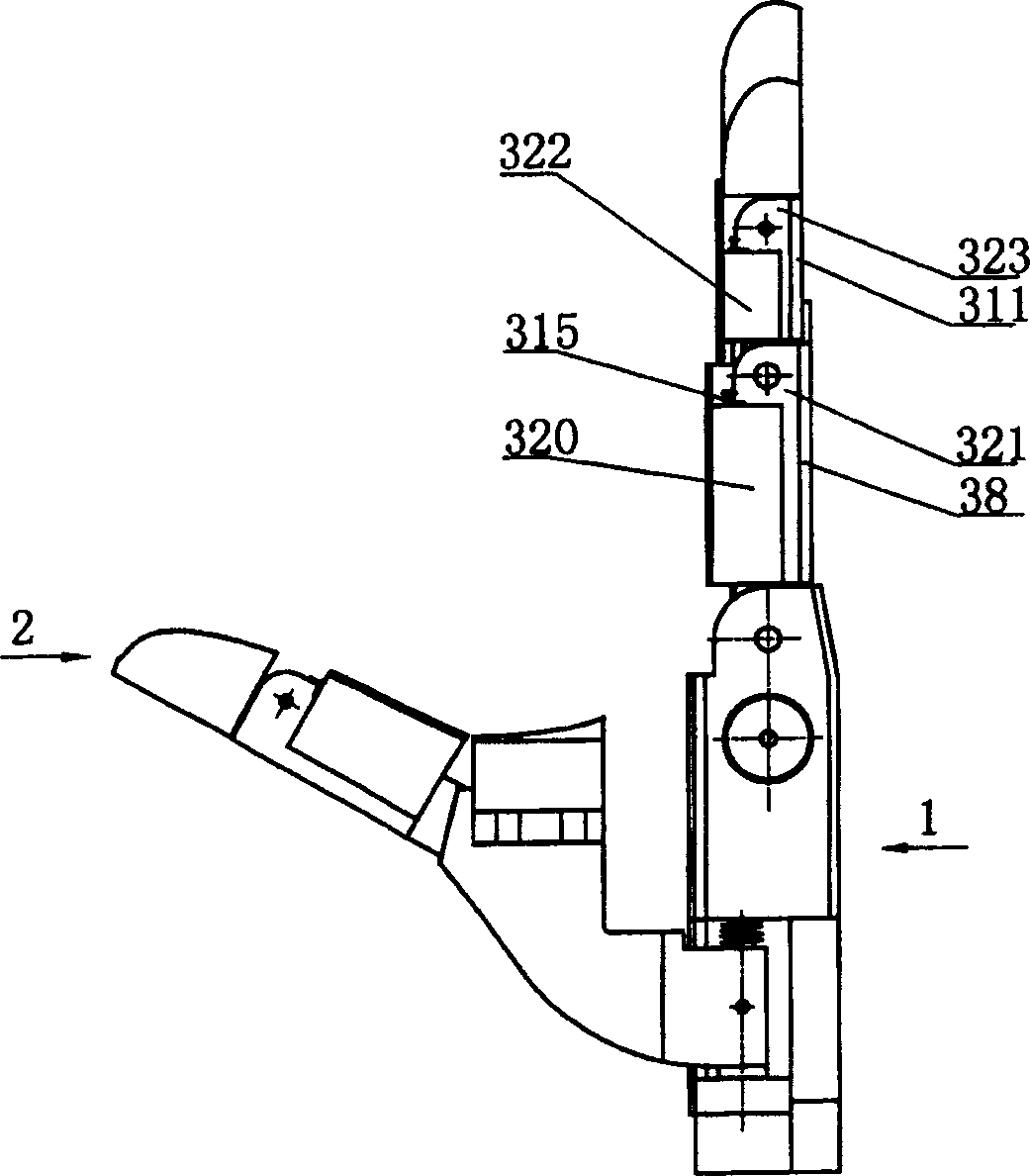
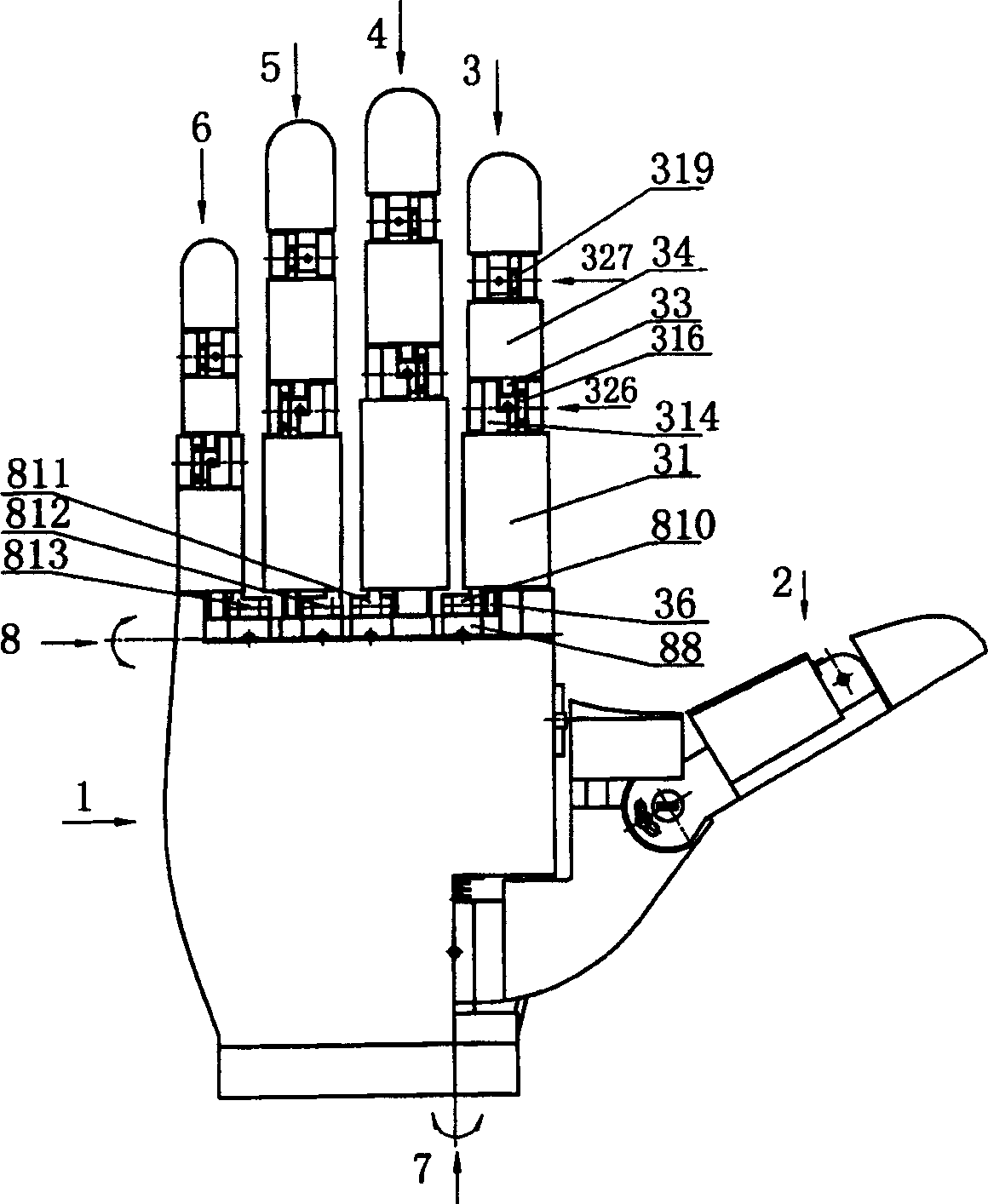
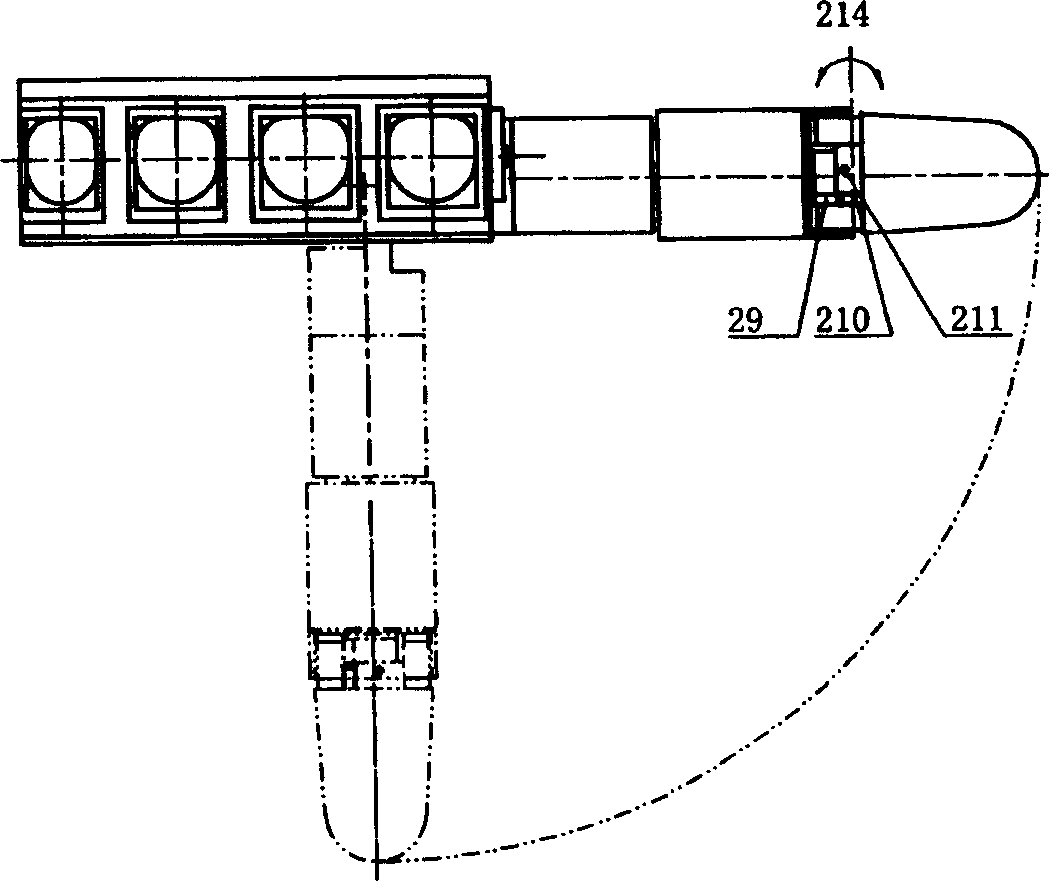
[0070] The appearance of an embodiment of a robot anthropomorphic multi-fingered hand device designed by the present invention is as follows: figure 1 , 2 , 3, mainly including palm 1, thumb 2, index finger 3, middle finger 4, ring finger 5, little finger 6, thumb base joint body 7, four finger base joint body 8; the profile of the whole device is similar to that of a human hand. The detailed structural diagram of this embodiment is as follows Figure 4 , 5 shown. Said thumb 2 includes thumb root knuckle 21, thumb end underactuated joint 214, thumb end knuckle 24; said index finger 3, middle finger 4, ring finger 5 and little finger 6 all include root knuckle and middle underactuated joint , middle phalanx, terminal underactuated joint, terminal phalanx; said index finger, midd...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com