Two-translation-three-rotation parallel mechanism for imaginary axis machine tool and robot
A technology of CNC machine tools and robots, which is applied in metal processing, metal processing equipment, manufacturing tools, etc., and can solve problems such as difficulty in solving end effector poses, complex structures, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
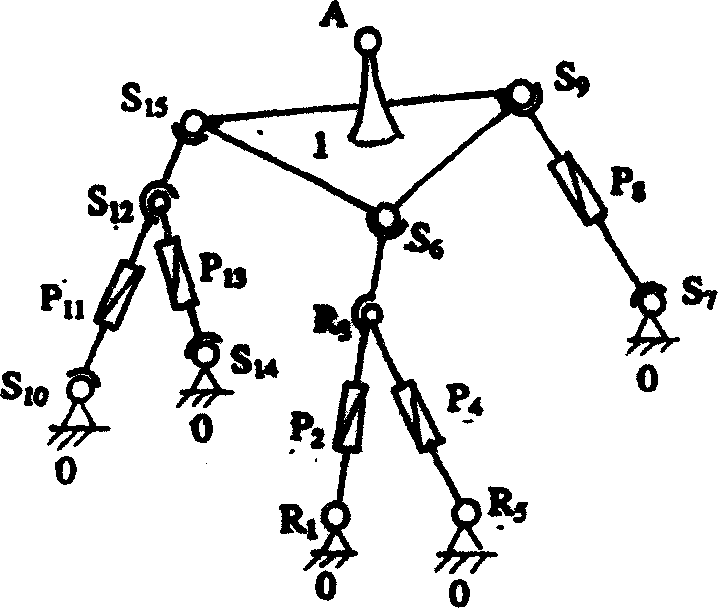
[0014] attached figure 2 The parallel mechanism shown can be regarded as an embodiment of the present invention for a virtual-axis mechanical measuring machine, and its specific structure has been described in the preceding appendix figure 2 illustrate. Install the measuring head A on the moving platform 1. After the scale parameters of each component of the mechanism are determined, control the five driving pairs P 2 ,P 4 ,P 8 ,P 11 with P 13 The input motion can control the three-dimensional coordinates of the measuring head A on the braking platform 1, which can be the actuator of the virtual axis mechanical measuring machine. Because there are 5 active inputs, it is beneficial to avoid the singular configuration of the mechanism.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com