Variable universe fuzzy control AGV (Automatic Guided Vehicle) correction method based on self-adaptive telescopic factor
A technology of fuzzy control and fuzzy controller, applied in two-dimensional position/channel control, combustion engine, internal combustion piston engine, etc., can solve problems such as restricting control efficiency, affecting the effect of rectification control, and difficult to find optimal values, etc. Achieve the effect of improving control effect, perfect control rules and short response time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions of the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments, but this does not limit the protection scope of the present application.
[0038] Taking an AGV as an example, the present invention will describe in detail the variable universe fuzzy control AGV deviation correction method based on the adaptive scaling factor. The method includes the following steps:
[0039] The first step is to perform kinematics analysis of the AGV to establish a kinematics state space model
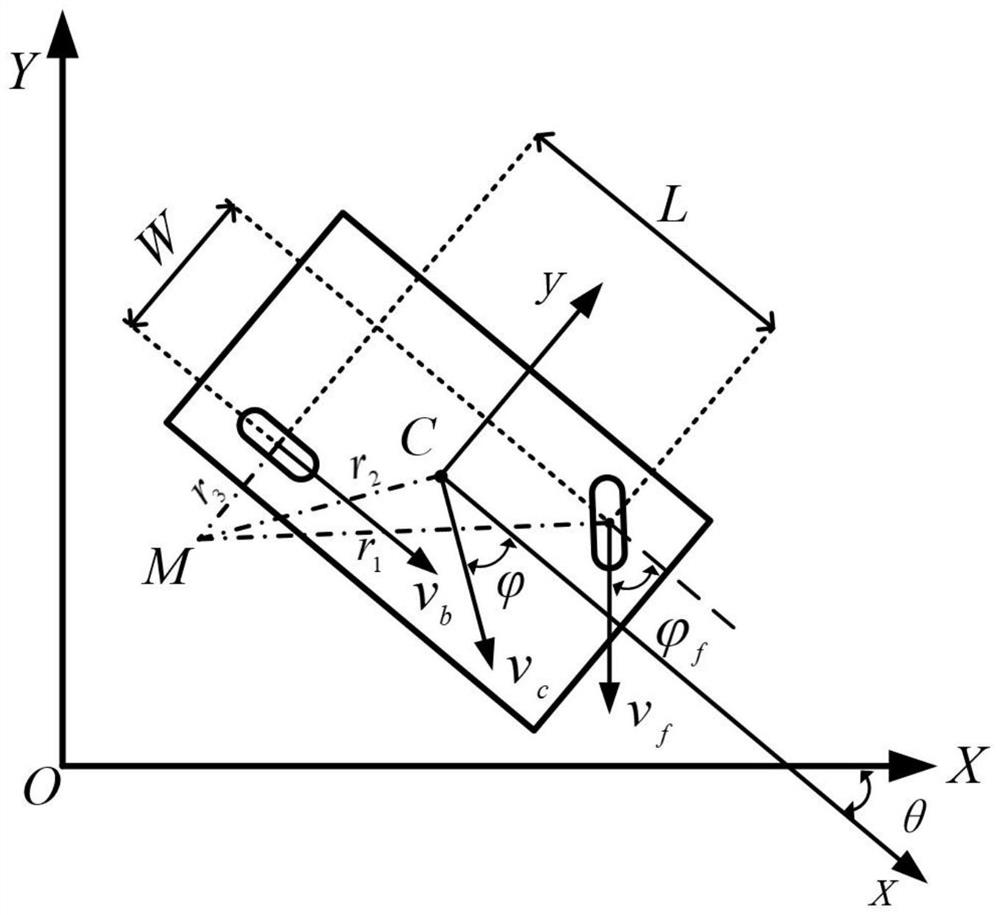
[0040] The AGV in this embodiment is a four-wheel structure, including two driving wheels (steering wheels) and two driven wheels, wherein the driving wheels are diagonally arranged steering wheels. And the driving strategy is that the front steering wheel is responsible for steering and turning, and the rear wheel is only responsible for turning. like figure 2As shown, taking the AGV turning right as an e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com