Intelligent networked automobile formation control method based on event triggering
An event-triggered and control method technology, applied in road vehicle traffic control systems, traffic control systems, instruments, etc., can solve the problems of measurement noise impact, frequent vehicle communication, etc., to reduce following error, communication frequency and energy consumption , the effect of increasing economic benefits
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
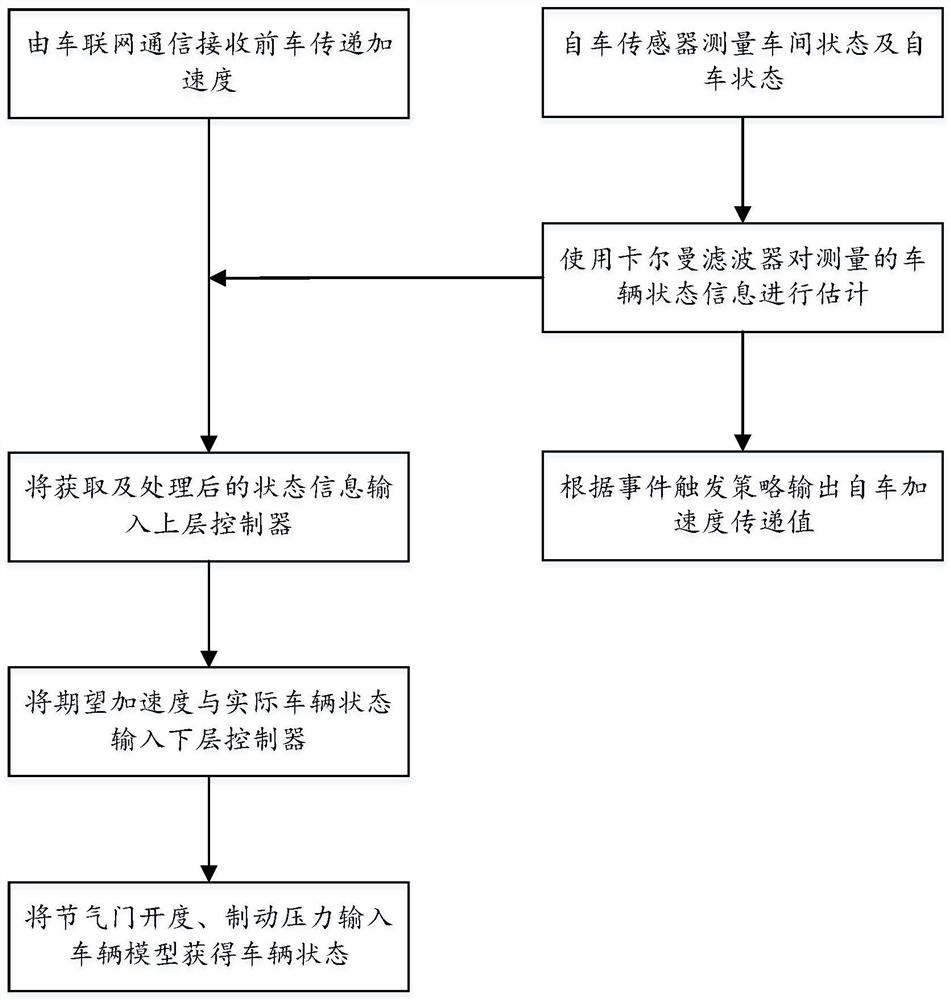
[0103] like figure 1 As shown, a method for formation control of intelligent networked vehicles based on event triggering and state estimation proposed by an embodiment of the present invention includes the following steps:
[0104] Step 1: Receive the status information of the preceding vehicle and the self-vehicle through the vehicle networking communication and the self-vehicle sensor measurement:
[0105] Receive the acceleration transmission value of the preceding vehicle through the Internet of Vehicles communication The distance x between the received vehicle and the preceding vehicle is measured by the self-vehicle sensor i-1 -x i -L, the relative speed v of the ego vehicle and the preceding vehicle i-1 -v i and the vehicle's acceleration a i .
[0106] Step 2: Use the Kalman filter to estimate the measured vehicle state information:
[0107] In step 2, the estimated value of the state information required by the vehicle needs to be obtained, including the foll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com