Self-adaptive terahertz three-dimensional tomography device and method
A technology of three-dimensional tomography and imaging devices, which is applied in the direction of measuring devices, optical devices, instruments, etc., can solve problems such as inability to guarantee, and achieve the effects of improving efficiency, improving imaging quality, and enhancing practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
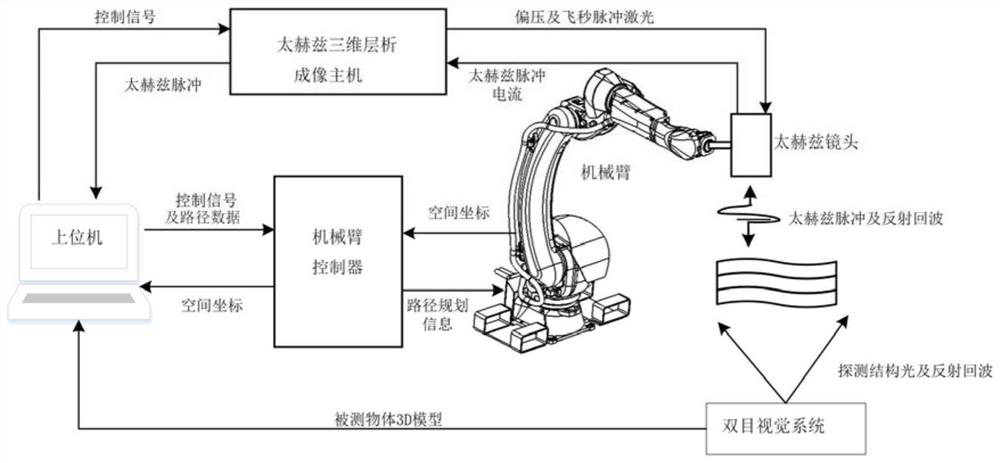
[0031] The robotic arm is the most widely used automatic mechanical device in the field of robotics, and it has a wide range of applications in industrial manufacturing, medical, entertainment services, military, semiconductor manufacturing, and aerospace. In different application scenarios, robotic arms have different appearances, but they all have a common feature, that is, they can accept instructions and accurately locate points in three-dimensional (or two-dimensional) space for operation. Among them, the six-axis robotic arm consists of six joints, each of which is driven by a servo motor to rotate, so that the robotic arm will obtain the maximum degree of freedom, and its execution end can reach any position in the operation space. Combining the six-axis robotic arm with the terahertz three-dimensional tomography system can enable the terahertz lens to obtain six degrees of freedom in space, breaking through the limitation that the two-dimensional scanning method can onl...
Embodiment 2
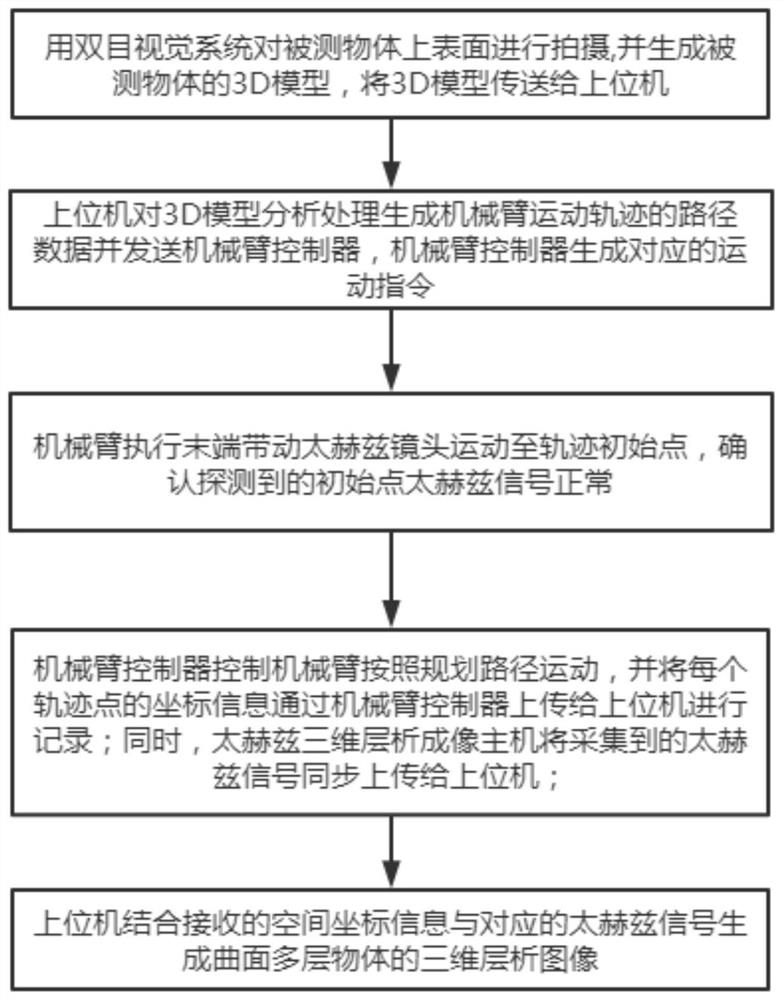
[0036] The invention also provides an adaptive terahertz three-dimensional tomography method, such as figure 2 As shown, the adaptive terahertz three-dimensional tomography device as described in Embodiment 1 can be used, and includes the following steps:
[0037] S1, use a binocular vision system to shoot the upper surface of the object to be measured. The binocular vision system rotates around the object to be measured. After the position is calibrated, the binocular image of each position is recorded, and a 3D model of the object to be measured is generated. The 3D model is sent to the host computer; the binocular vision system has a binocular field of view greater than 120°, so it is necessary to rotate the binocular vision system around the measured object to at least 3 positions.
[0038] S2, the host computer analyzes and processes the 3D model and generates path planning data of the motion trajectory of the robotic arm, and the path planning data is sent to the roboti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com