Underwater vehicle docking control method based on reinforcement learning
An underwater vehicle and reinforcement learning technology, applied in the direction of height or depth control, sustainable transportation, etc., can solve problems such as docking control of underwater vehicles, so as to promote the completion of docking tasks, promote high robustness, and improve autonomous vehicles. The effect of learning ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0141] An underwater vehicle docking control method based on reinforcement learning, comprising the following steps:
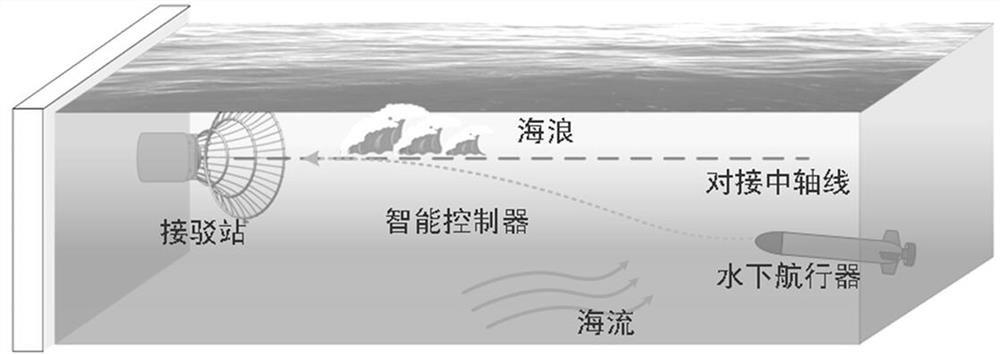
[0142] Step 1. Define the task environment and model
[0143] 1-1. Build the task environment where the underwater vehicle is located and the dynamic model of the underwater vehicle;
[0144] The task environment consists of Coordinate system, 3D area with 3D map size set, 3D cone docking station area;
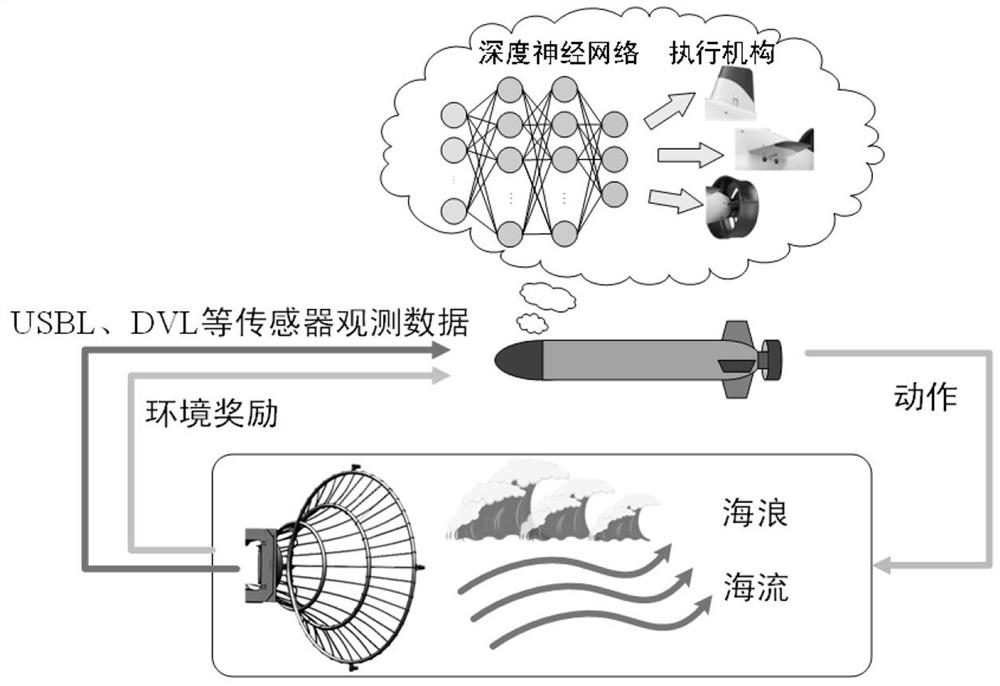
[0145] The underwater vehicle includes three actuators, namely the stern thruster, the stern horizontal rudder and the stern vertical rudder;
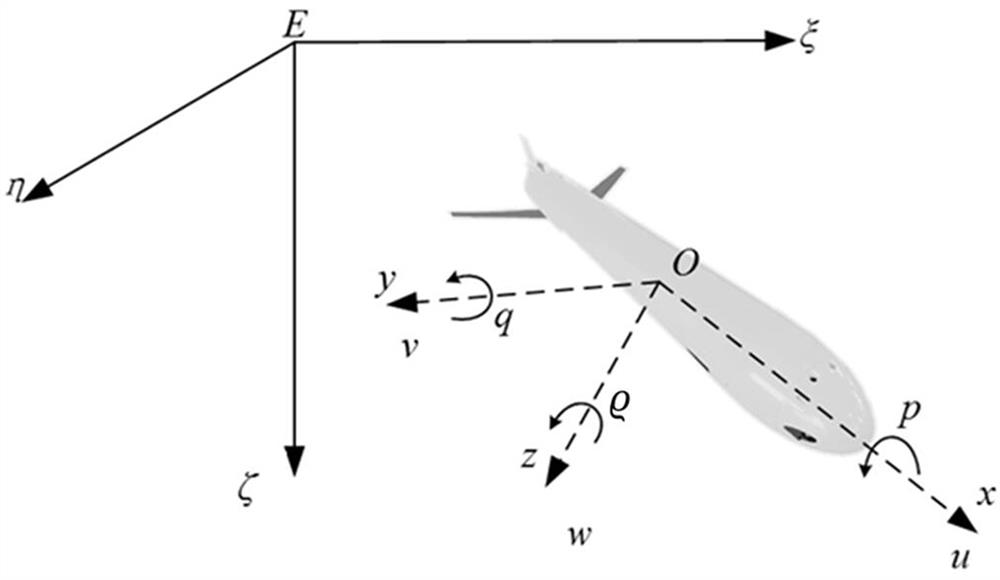
[0146] Through the derivation based on the Newton-Eulerian equation of motion in the simulation, a streamlined underwater vehicle with a length of 2.38 meters, a diameter of 0.32 meters, and a weight of 167 kilograms is modeled with six degrees of freedom, including, in The coordinates of the underwater vehicle in the coordinate system and attitude angle To describe, use the center of gravity as the origin, wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com