Indoor mobile robot path planning method fusing improved A* and DWA algorithms
A mobile robot, path planning technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of optimal, only considering, unable to achieve global path, etc., to improve algorithm efficiency, Path smoothing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below with reference to the accompanying drawings and specific embodiments.
[0026] In order that the technical solution of the present invention can be fully understood, the A* algorithm is briefly introduced as follows:
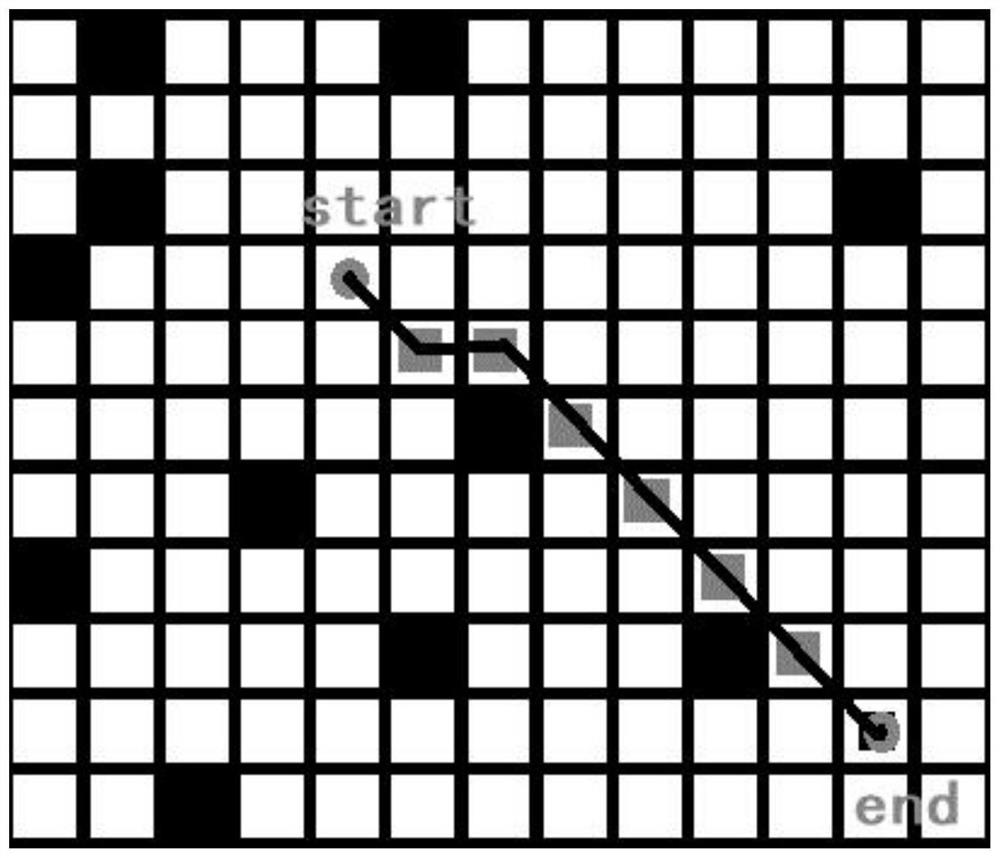
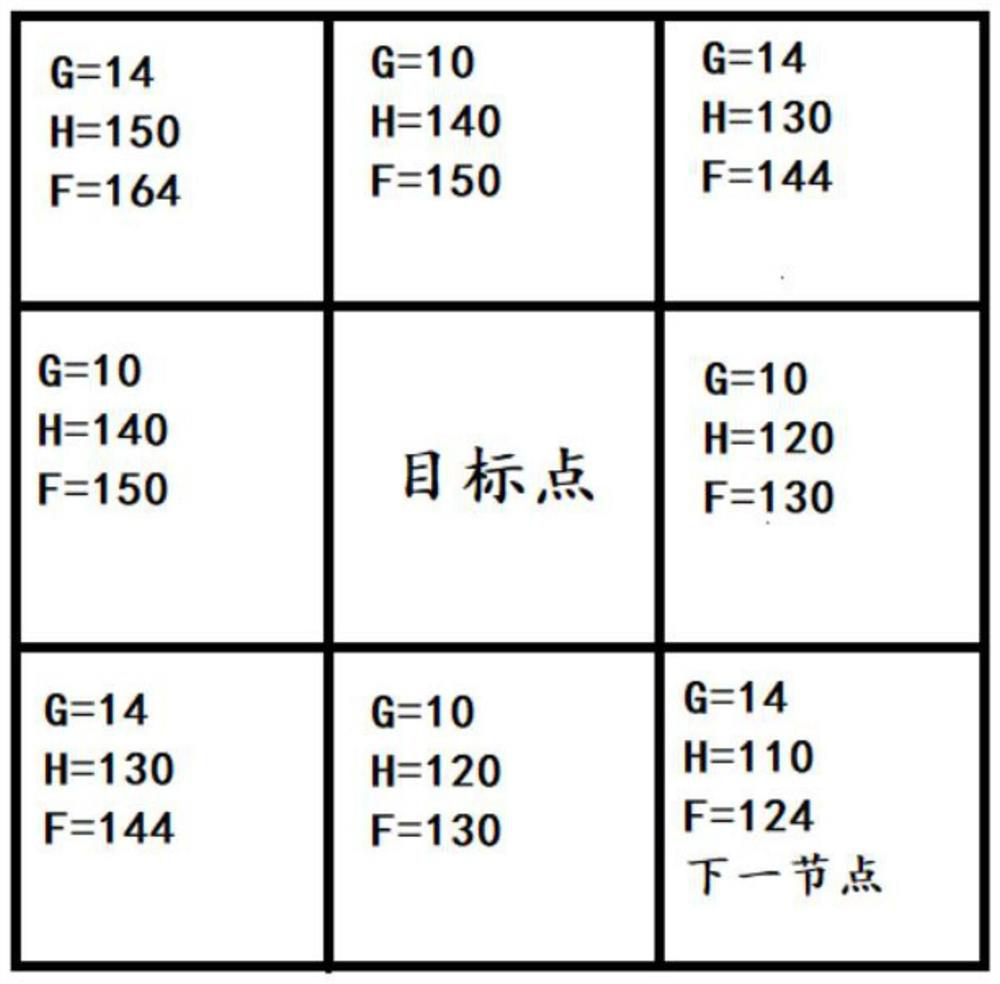
[0027] The traditional A* algorithm search principle is to add the starting point to the open list, add this point as the parent node to the close list, and search for its adjacent reachable nodes to add to the open list. Calculate the cost of the nodes in the open list according to the cost function, select the node with the lowest cost as the next parent node and put it in the close list, search for the reachable node of the parent node again and calculate its cost, and cycle in turn until the parent node is the position of the target point .
[0028] The cost function of the traditional A* algorithm is: F(n)=G(n)+H(n). In the formula, n represents the current node, and F(n) represents the cost fun...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com