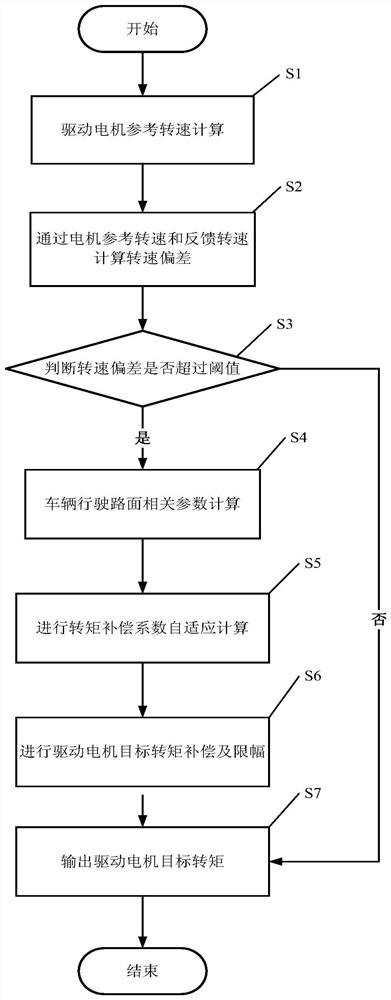
Compensation coefficient self-adaptive torque compensation method
A technology of torque compensation and compensation coefficient, applied in power management, control drive, control device and other directions, can solve problems such as driving conditions and road conditions limitations, vehicle jitter, affecting drivability, etc., to improve the drivability of the whole vehicle, Accurate and fast compensation, the effect of suppressing vehicle shake
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the objectives, technical solutions and advantages of the present invention clearer, the technical solutions in the embodiments of the present invention will be described in more detail below with reference to the accompanying drawings in the embodiments of the present invention. The described embodiments are some, but not all, of the embodiments of the invention. The embodiments described below with reference to the accompanying drawings are exemplary, and are intended to be used to explain the present invention, but should not be simply construed as a limitation of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without creative work fall within the protection scope of the present invention. Embodiments of the present invention are described in detail below in conjunction with the accompanying drawings:
[0045] In the description of the present invention, it should ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com