Control moment gyroscope decoupling control method
A technology for controlling torque gyroscopes and decoupling control, which is applied in electric controllers, controllers with specific characteristics, and power management. , the effect of solving the approximation error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] To facilitate the understanding of the present invention, the present invention will be described more comprehensively below with reference to the relevant drawings. Exemplary embodiments of the present invention are given in the accompanying drawings.
[0028] The present invention proposes a control torque gyro decoupling control method, comprising the following steps:
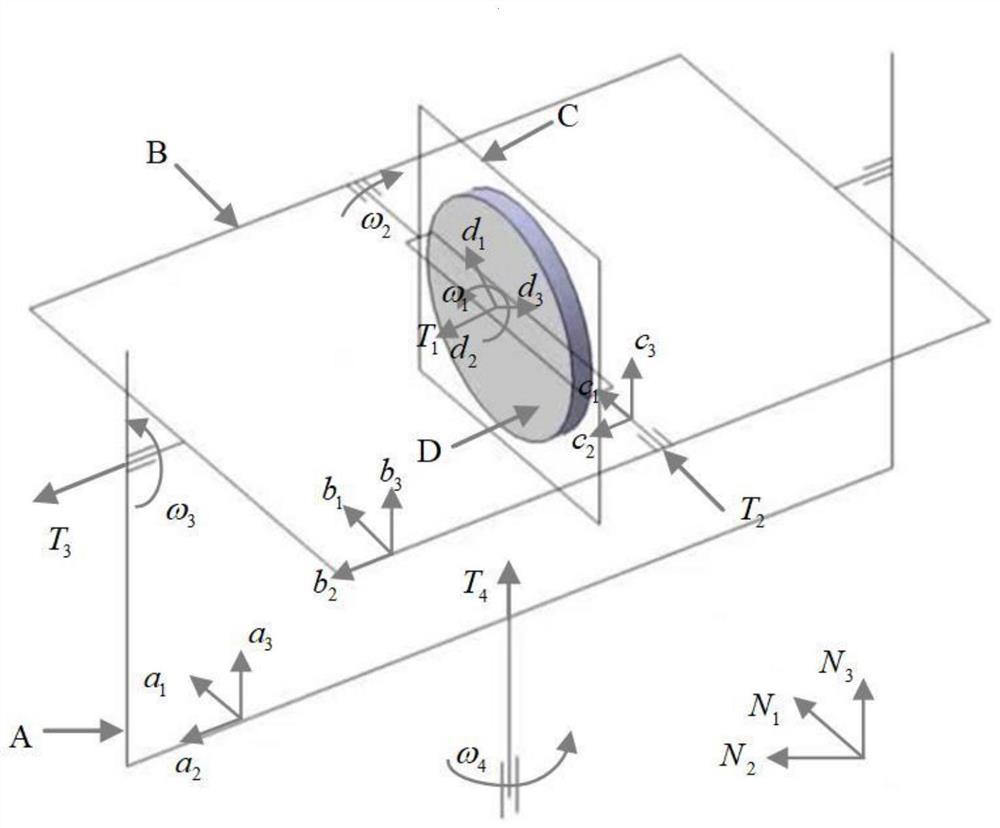
[0029] S1, the present embodiment adopts the dynamics simplified model of the ECP750 control torque gyroscope, the coordinate system is defined as such Figure 1 as shown, where D is the gyro high-speed rotor, N i (i=1,2,3) is an inertial coordinate system with an orthogonal vector a i 、 b i 、c i and d i The right-handed set (i=1, 2, 3) is fixed in frames A, B, C, and D, respectively. The rotational angular rate of frame A relative to the inertial frame is denoted as ω 4 , whose corresponding angle of rotation is denoted as q 4 ; Similarly: the rotational angle rate of frame B relative to frame A is denote...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com