Gait self-adaptive control method and system for hemiplegic patient
A self-adaptive control and gait technology, applied in applications, appliances that help people move, medical science, etc., can solve the problems of inconvenient wearing, difficult to be accurate, affecting the comfort of the power-assisted exoskeleton human body, etc., to solve the problem of gait. Inconsistent, easy-to-control and stable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below with reference to the accompanying drawings and specific embodiments.
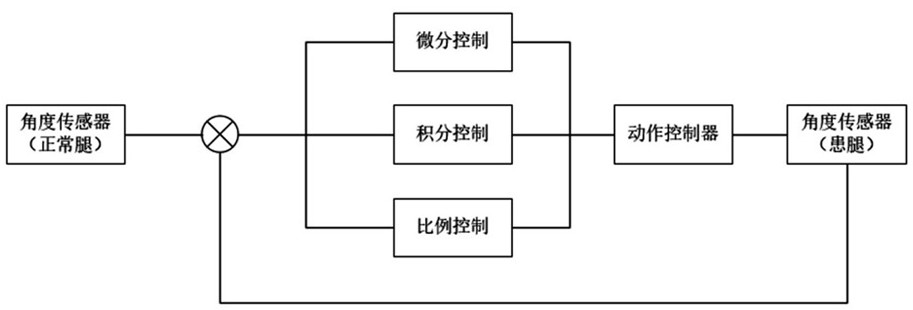
[0019] like figure 1 As shown, the gait adaptive control method for hemiplegic patients according to the embodiment of the present invention includes the steps:
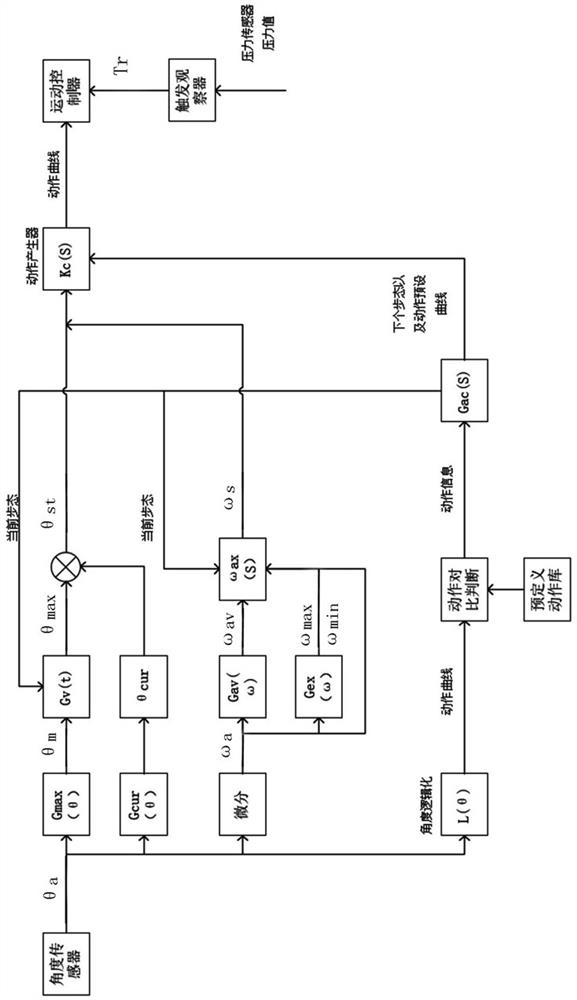
Detect the angle θ of the normal leg side a , get the current stride information θ st and pace information ω s ;
Convert the angle θ in continuous time a Integrate into a motion curve, and compare the motion curve with the predefined motion curve to obtain the next gait preset motion;
Preset action based on next gait and current stride information θ st and pace information ω s , get the action curve of the next gait;
Control the movement of the affected leg according to the movement curve of the next gait.
[0020] Compared with several existing control strategies (robot position control, motion track tracking control, sensitivity amplification control), the present invention...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com