Robot scheduling method and device, electronic equipment and storage medium
A scheduling method and robot technology, applied in the field of robotics, can solve the problems of affecting the scheduling efficiency of robots and low flexibility of scheduling, and achieve the effect of improving flexibility and efficiency and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
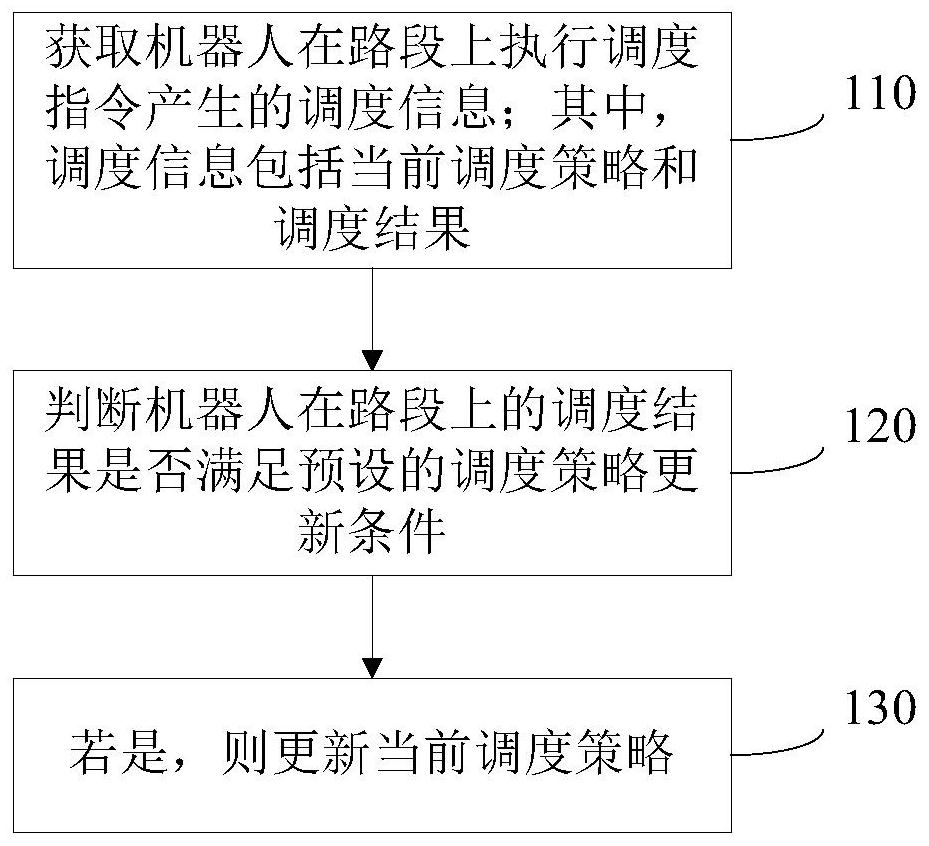
[0061] figure 1 It is a schematic flow chart of a robot scheduling method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where multiple robots are scheduled at runtime. The method can be executed by a robot scheduling device, which can Implemented in the form of hardware and / or software. like figure 1 As shown, the method includes:
[0062] Step 110, acquiring dispatching information generated by the robot executing dispatching instructions on road sections; wherein the dispatching information includes the current dispatching strategy and dispatching results.
[0063] Among them, multiple robots operate in the same workplace. When the robot is driving, if there are multiple robots on a road, the phenomenon of robot congestion may occur. For example, robots can travel towards each other or in the same direction. To pre-set the dispatch strategy on each road section, you can pre-set the relationship between the road section ...
Embodiment 2
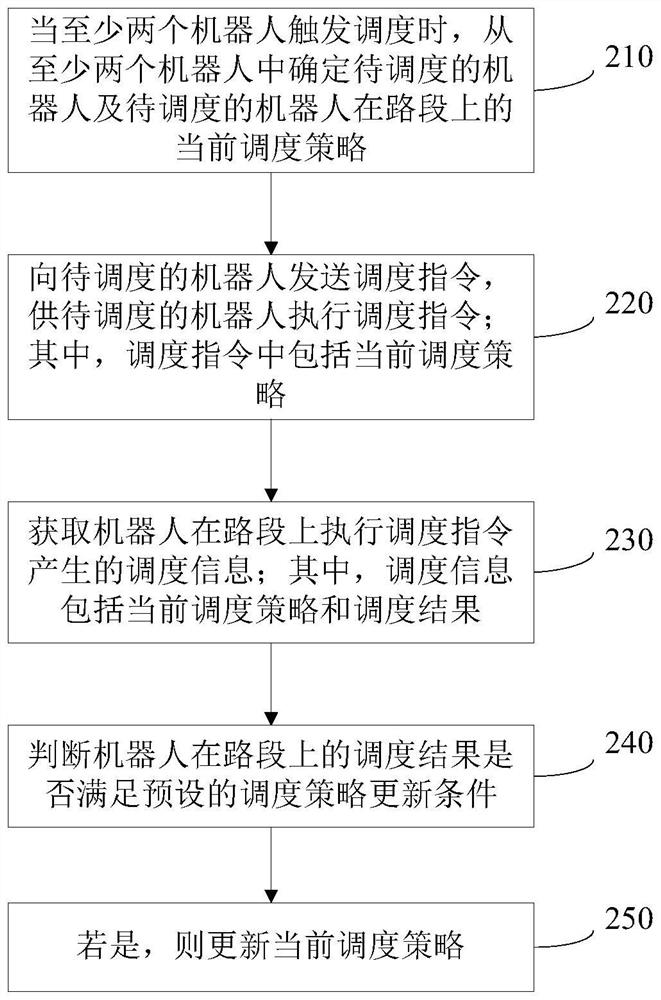
[0080] figure 2 It is a schematic flowchart of a robot scheduling method provided by Embodiment 2 of the present invention. This embodiment is an optional embodiment based on the above-mentioned embodiments, and the method can be executed by a robot scheduling device.
[0081] In this embodiment, before obtaining the scheduling information generated by the robot executing the scheduling instruction on the road section, it can be added: when at least two robots trigger scheduling, determine the robot to be dispatched and the robot to be dispatched on the road section from at least two robots The current scheduling strategy on the network; send scheduling instructions to the robots to be scheduled, for the robots to be scheduled to execute the scheduling instructions; wherein, the scheduling instructions include the current scheduling strategy.
[0082] like figure 2 As shown, the method specifically includes the following steps:
[0083] Step 210, when at least two robots t...
Embodiment 3
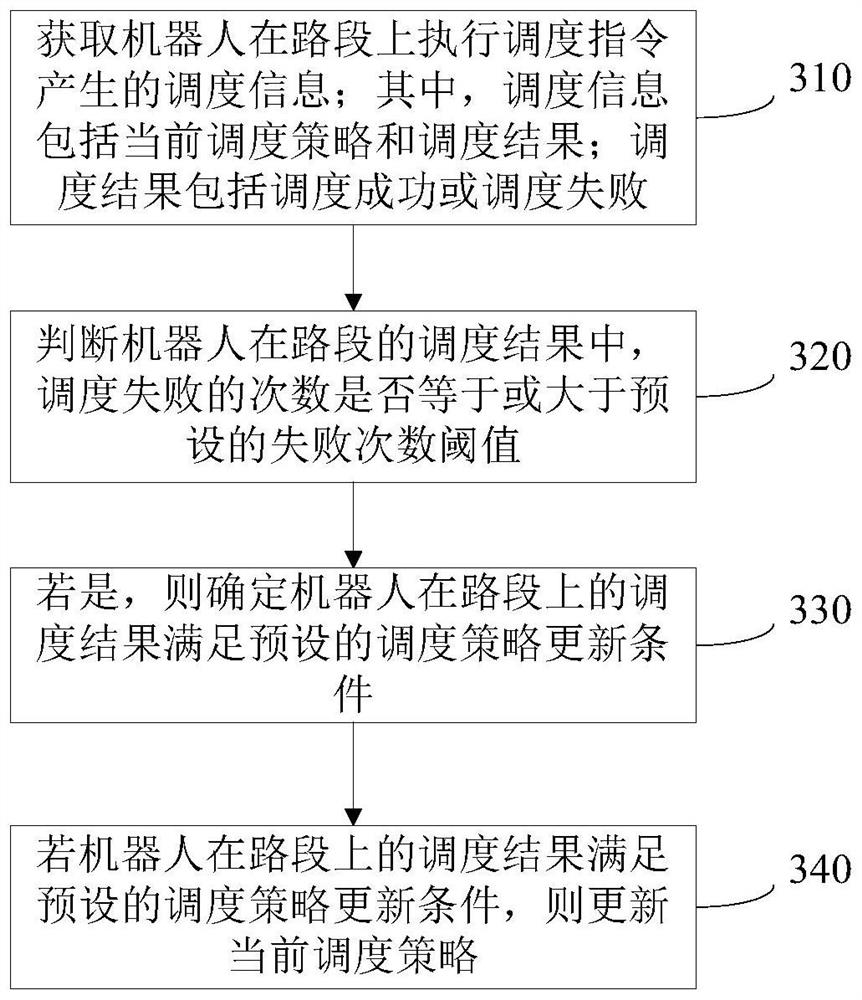
[0101] image 3 It is a schematic flowchart of a robot scheduling method provided by Embodiment 3 of the present invention. This embodiment is an optional embodiment based on the foregoing embodiments, and the method can be executed by a robot scheduling device.
[0102] In this embodiment, the dispatching result includes dispatching success or dispatching failure; judging whether the dispatching result of the robot on the road section meets the preset dispatching policy update condition can be refined as: judging whether the dispatching result of the robot on the road section fails. Whether the number of times is equal to or greater than the preset failure times threshold; if so, it is determined that the scheduling result of the robot on the road section meets the preset scheduling strategy update condition.
[0103] like image 3 As shown, the method specifically includes the following steps:
[0104] Step 310 : Obtain dispatching information generated by the robot execut...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com