Indoor robot navigation control method, device, equipment and medium
A technology of indoor robot and control method, applied in two-dimensional position/channel control, control/regulation system, non-electric variable control and other directions, can solve the problems of not supporting midway diversion, indoor robot not having active follow-up, etc., to achieve liberation People, the effect of good customer experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0027] Figure 1a It is a flowchart of an indoor robot navigation control method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where the indoor robot actively follows and avoids obstacles in real time. The method of this embodiment can be executed by an indoor robot navigation control device, which can be realized by means of software and / or hardware, and which can be configured in a server.
[0028] Correspondingly, the method specifically includes the following steps:
[0029] S110. Acquire a captured image of a target pedestrian to be positioned by at least one target camera in an indoor environment, and determine two-dimensional image coordinates of the target pedestrian with respect to each of the target cameras according to the captured image.
[0030] Wherein, the two-dimensional image coordinates may refer to coordinates of a planar image that does not contain depth information, and the corresponding two-dimensional ...
Embodiment 2
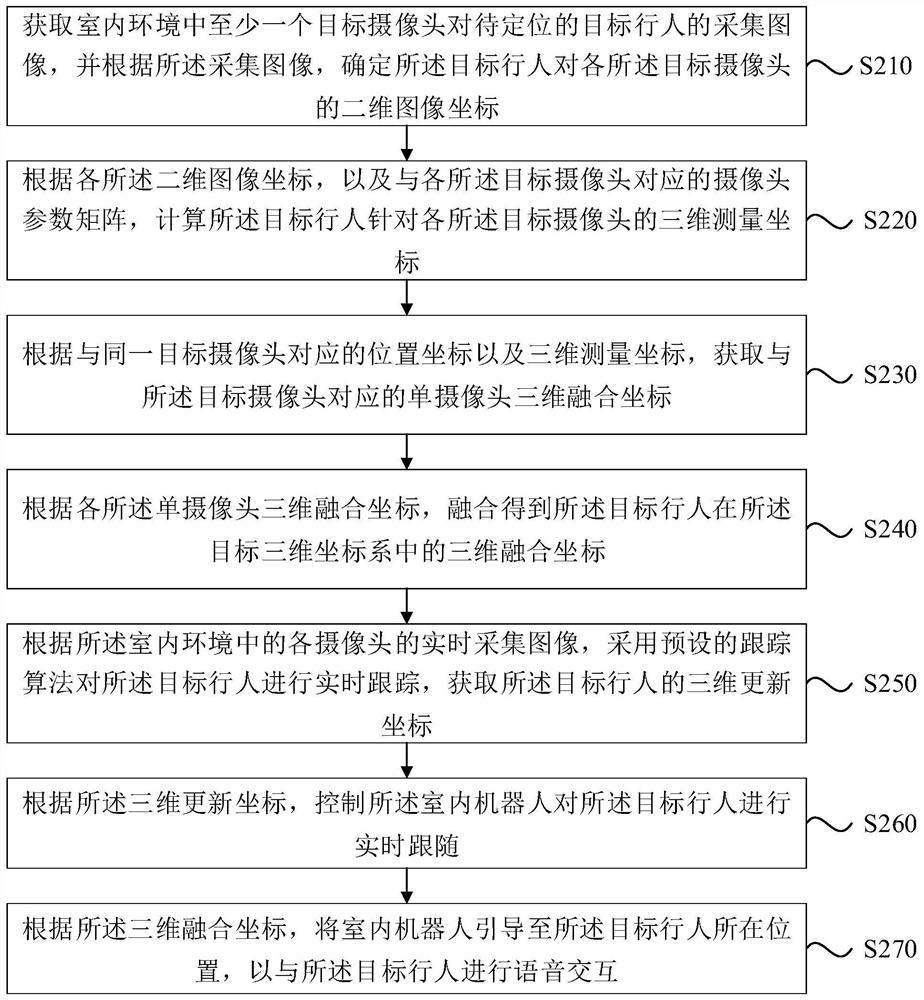
[0065] figure 2 It is a flow chart of another indoor robot navigation control method provided by Embodiment 2 of the present invention. This embodiment is refined on the basis of the above-mentioned embodiments, and according to the position coordinates of each of the target cameras in the target three-dimensional coordinate system, and each of the three-dimensional measurement coordinates, the target pedestrian is obtained by fusion. The 3D fusion coordinates in the target 3D coordinate system are further refined, refer to figure 2 , the method specifically includes the following steps:
[0066] S210. Acquire a captured image of a target pedestrian to be positioned by at least one target camera in an indoor environment, and determine two-dimensional image coordinates of the target pedestrian with respect to each of the target cameras according to the captured image.
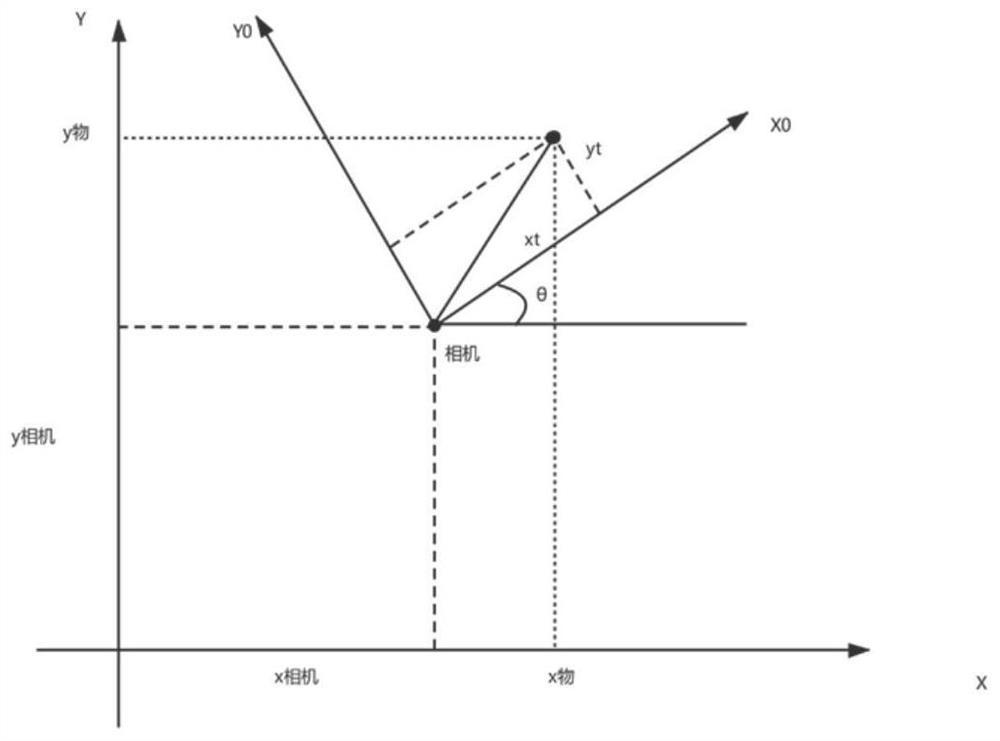
[0067] S220. Calculate the three-dimensional measurement coordinates of the target pedestrian with respec...
Embodiment 3
[0077] Figure 3a It is a flow chart of another indoor robot navigation control method provided by Embodiment 3 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiments, and before the acquisition of the image of the target pedestrian to be positioned by at least one target camera in the indoor environment, it also includes: using the vanishing point estimation algorithm to estimate the target pedestrian in the indoor environment The parameters of each camera are calibrated. refer to Figure 3a , the method specifically includes the following steps:
[0078] S310. Calibrate the parameters of each camera in the indoor environment by using a vanishing point estimation algorithm.
[0079] Among them, the vanishing point estimation algorithm can be based on a dynamic programming method, in which the horizon is detected line by line, and the information used is road surface parallax and edge, while the vanishing point is the intersecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com