Under-actuated continuum mechanical arm
A continuum and robotic arm technology, applied in the direction of manipulators, claw arms, manufacturing tools, etc., can solve the problems of reducing the overall weight and volume of the robotic arm, simplifying the structure, etc., to achieve load ratio, high load ratio, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
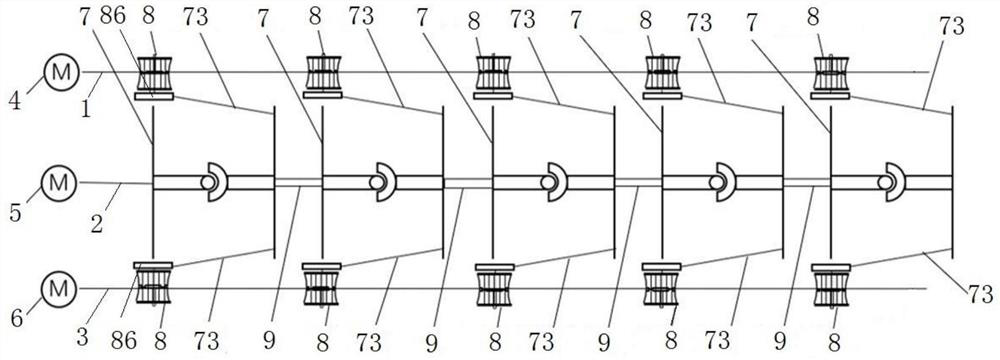
[0040] refer to figure 1 As shown, this embodiment discloses an underactuated continuum mechanical arm, which includes three driving motors, three driving ropes and a plurality of sequentially connected joints 7, and the driving motors and the driving ropes correspond one-to-one;
[0041] Each joint 7 includes a dynamic platform 71 and a static platform 72, which are connected by a spherical pair between the dynamic platform 71 and the static platform 72; three driven ropes 73 are connected to the dynamic platform 71 in each joint 7 to pass Driven rope 73 transmits power to moving platform 71;
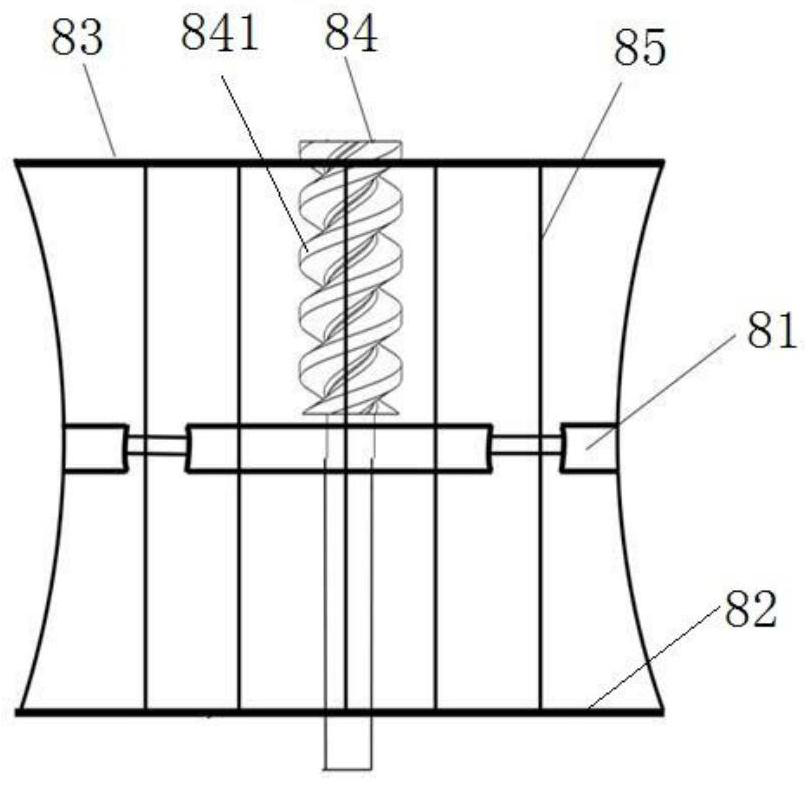
[0042] Each joint 7 is connected with three variable-diameter drive mechanisms 8 to dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com