Touch fingertip sensor and operating system and data processing method thereof
A data processing and sensor technology, which is applied in image data processing, instruments, image analysis, etc., can solve the problems of limited sensor sensing area, inconvenient sensor installation, and large sensor size, so as to facilitate deployment, wear, and expand the sensing area Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
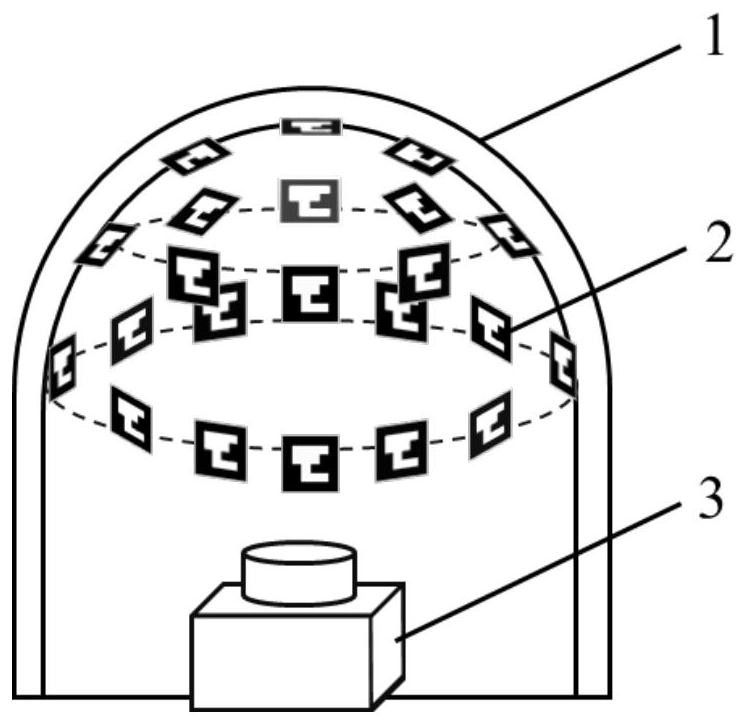
[0055] This embodiment describes a tactile fingertip sensor, which includes a tactile skin 1, a marker array sticker 2 and a monocular camera 3, the tactile skin 1 is used to convert physical contact into visual information that can be captured by the camera, and the marker array sticker 2 The markers in include position information and attitude information, which can be decoded and obtained by a computer, and the monocular camera 3 is used to capture the internal image of the tactile skin 1 . The marker array sticker 2 is pasted on the inner side of the tactile skin 1, and the bottom of the tactile skin 1 and the tactile fingertip sensor form a hollow cavity. The monocular camera 3 is installed on the bottom of the tactile fingertip sensor and is located in the hollow cavity. The domain covers the inner side of the tactile skin 1 .
[0056] Among them, the tactile skin 1 is the outermost layer of the tactile fingertip sensor. In order to fully reflect the deformation, it need...
Embodiment 2
[0060] This embodiment describes an operating system that includes the tactile fingertip sensor of Embodiment 1, the operating system is as Figure 4 As shown, the operating system also includes a host computer 7, the tactile fingertip sensor 5 is worn on the end of the mechanical finger 4 for grasping the object 6, and both the tactile fingertip sensor 5 and the mechanical finger 4 are connected to the host computer 7 through cables. When the mechanical finger 4 grasps the object 6, the surface of the elastic surface of the tactile fingertip sensor 5 and the tactile skin 1 will be deformed, which will cause the displacement of the mark array, and the monocular camera 3 will send the captured image to the host computer 7 for image processing and estimation. The force and deformation of the grasped object, and then control the force applied by the mechanical finger 4. For example, if it is judged that the applied force is too large, the control is turned down; if the applied for...
Embodiment 3
[0062] This embodiment describes the workflow of the operating system in Embodiment 2, that is, the data processing flow and method, the workflow is as follows Figure 8 As shown, the details are as follows:
[0063] S1. The monocular camera 3 captures the deformed image of the tactile skin 1 and transmits the deformed image to the host computer 7 .
[0064] When the mechanical finger 4 grabs the object, the tactile fingertip sensor 5 touches the object 6, and the elastic tactile skin 1 is deformed due to extrusion, and the deformed image of the tactile skin 1 is captured by the monocular camera 3, and the deformed image is transmitted to the host machine7.
[0065] S2. The host computer 7 internally runs the ArUco code marker detection program, and after judging that a sufficient number of markers have been detected, saves the three-dimensional position and pose information of each marker point.
[0066] The ArUco code consists of an equal-width black border and a specific ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com