Active capture underwater vehicle docking mechanism and working method thereof
A docking mechanism and submarine technology, which is applied to underwater operation equipment, underwater ships, motor vehicles, etc., can solve the problems of insufficient docking accuracy and low automation level, achieve good dynamic performance, avoid docking pose errors, and system fast response effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
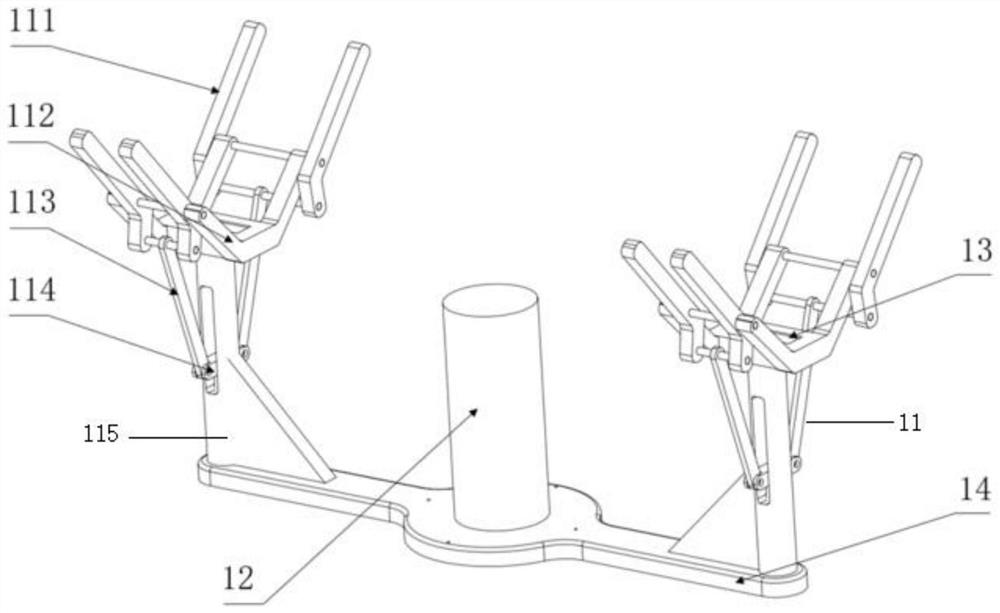
[0038] The present invention provides a docking mechanism for actively capturing underwater vehicles, such as figure 1 As shown, it includes clamping module 1, six-degree-of-freedom parallel robot 2, underwater base 3, control module 4, battery 5 and positioning module 6, control module 4 is connected to six-degree-of-freedom parallel robot 2, and six-degree-of-freedom parallel robot 2 Connected to the underwater base 3, the underwater base 3 is provided with a storage battery 5, the storage battery 5 is connected to the positioning module 6, the top of the six-degree-of-freedom parallel robot 2 is connected to the clamping module 1, and the clamping module 1 passes the control module 4 and the six 2 DOF parallel robots move synchronously. The six-degree-of-freedom parallel robot 2, the control module 4, the battery 5, and the positioning module 6 are installed on the underwater base 3, and the underwater base 3 is installed on the seabed or an underwater floating platform. Th...
Embodiment 2
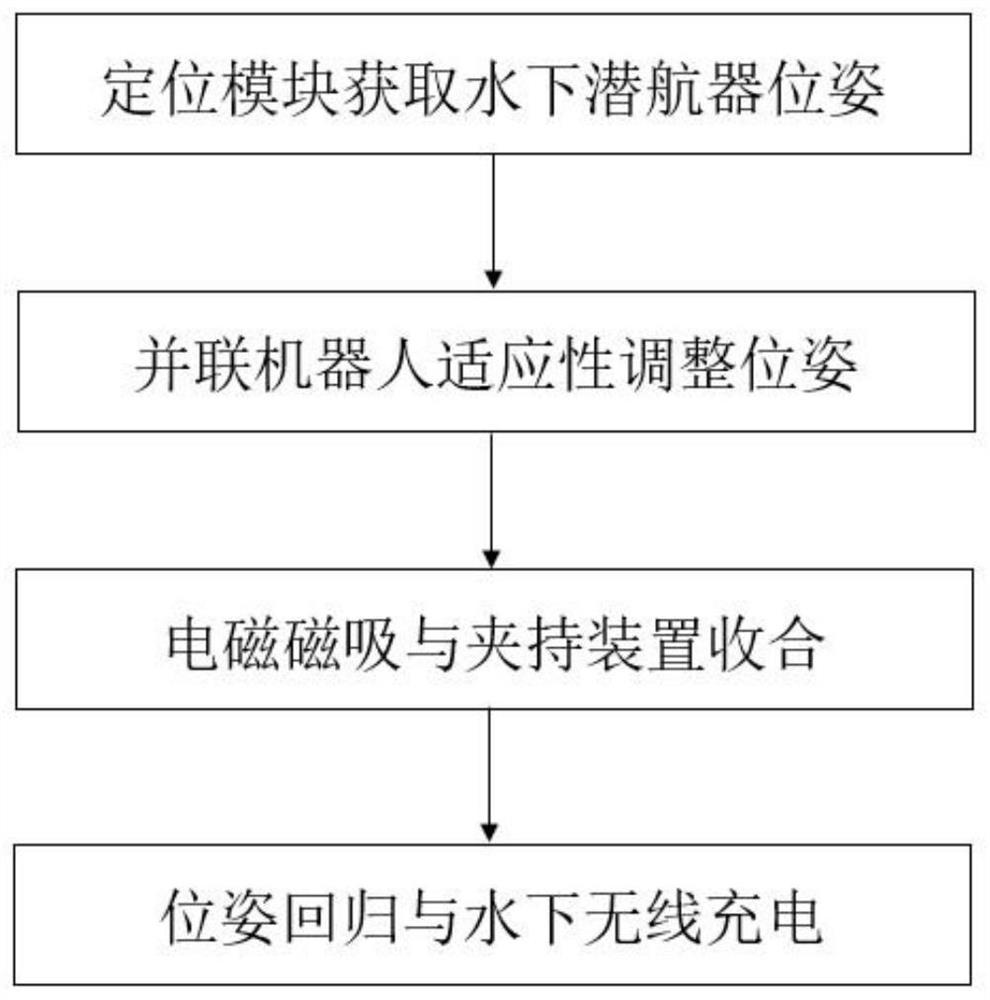
[0045] The present invention also provides a working method for actively capturing the docking mechanism of the underwater vehicle, such as image 3 shown, including the following steps:
[0046] S1: The underwater vehicle 7 returns to the capturing workspace, the positioning module 6 obtains the pose of the underwater vehicle 7, and feeds back the pose information of the underwater vehicle 7 to the control module 4;
[0047] S2: According to the pose of the underwater vehicle 7, the control module 4 controls the motor of the six-degree-of-freedom parallel robot 2, so that the clamping module 1 moves to the pose of the underwater vehicle 7;
[0048] S3: the control module 4 starts the electromagnetic magnetic attraction device 13, the underwater vehicle 7 and the clamping device 11 are attracted together, and the control module 4 controls the clamping device 11 to close, so as to realize the capture of the underwater vehicle 7;
[0049] S4: The control module 4 controls the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com