Multi-AGV mobile robot path optimization method based on two-dimensional code navigation
A mobile robot, path optimization technology, applied in two-dimensional position/channel control and other directions, can solve problems such as path deadlock and reduce system operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
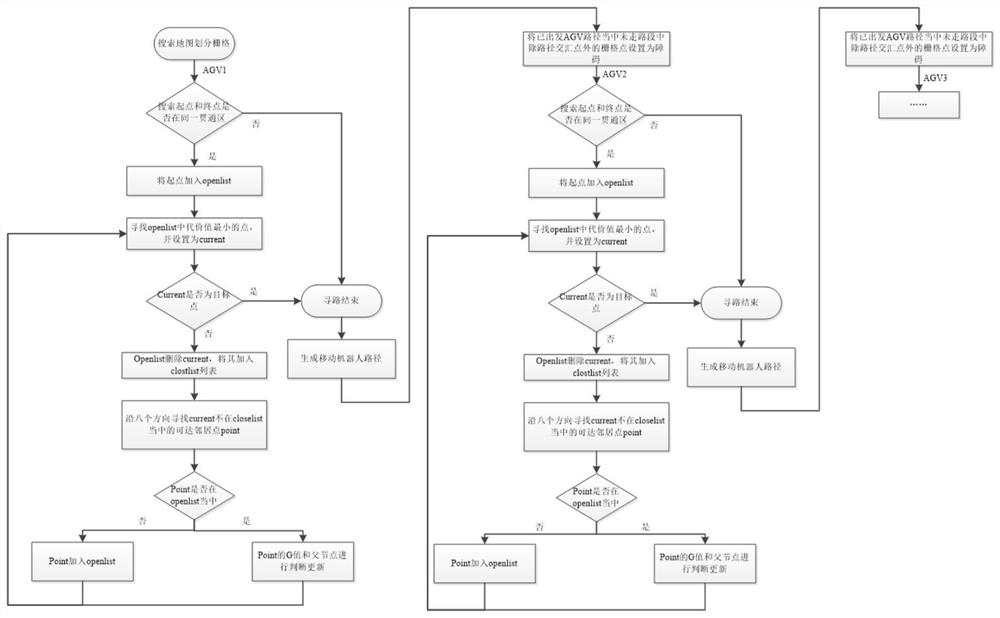
[0043] see figure 2 , the concrete scheme that the present invention adopts is:
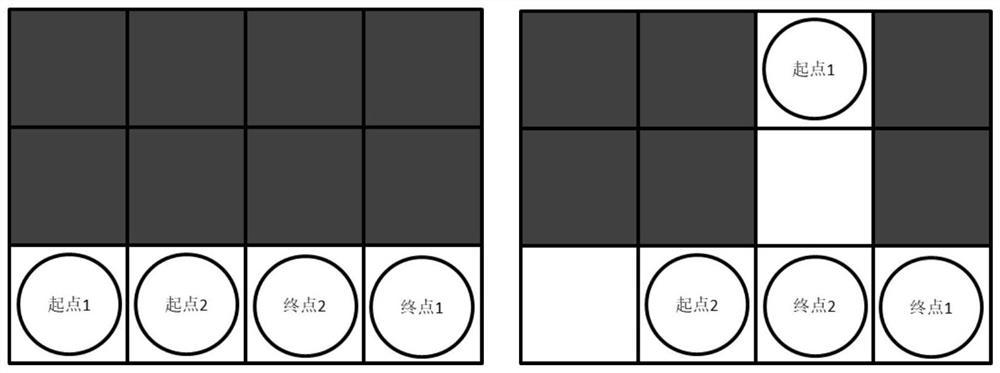
[0044] S1, based on the two-dimensional code road sign pasting method in the actual terrain map state, is redefined as:
[0045] S11, the work site and special location information are abstracted into nodes, but the nodes are represented by a grid, and the size of the grid unit is uniform, and the connectivity between nodes is the direction that the grid allows. Assuming that the number of grids is n, the map can be expressed as:
[0046] G=(D,P,B) (1)
[0047] D=(Up,Down,Left,Right) (2)
[0048] P={P i |i∈n} (3)
[0049] B={b ij |i,j∈n} (4)
[0050] Equation (2) represents the direction of travel of the grid, and Equ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com